yihui-he / Epipolar Transformers
Licence: mit
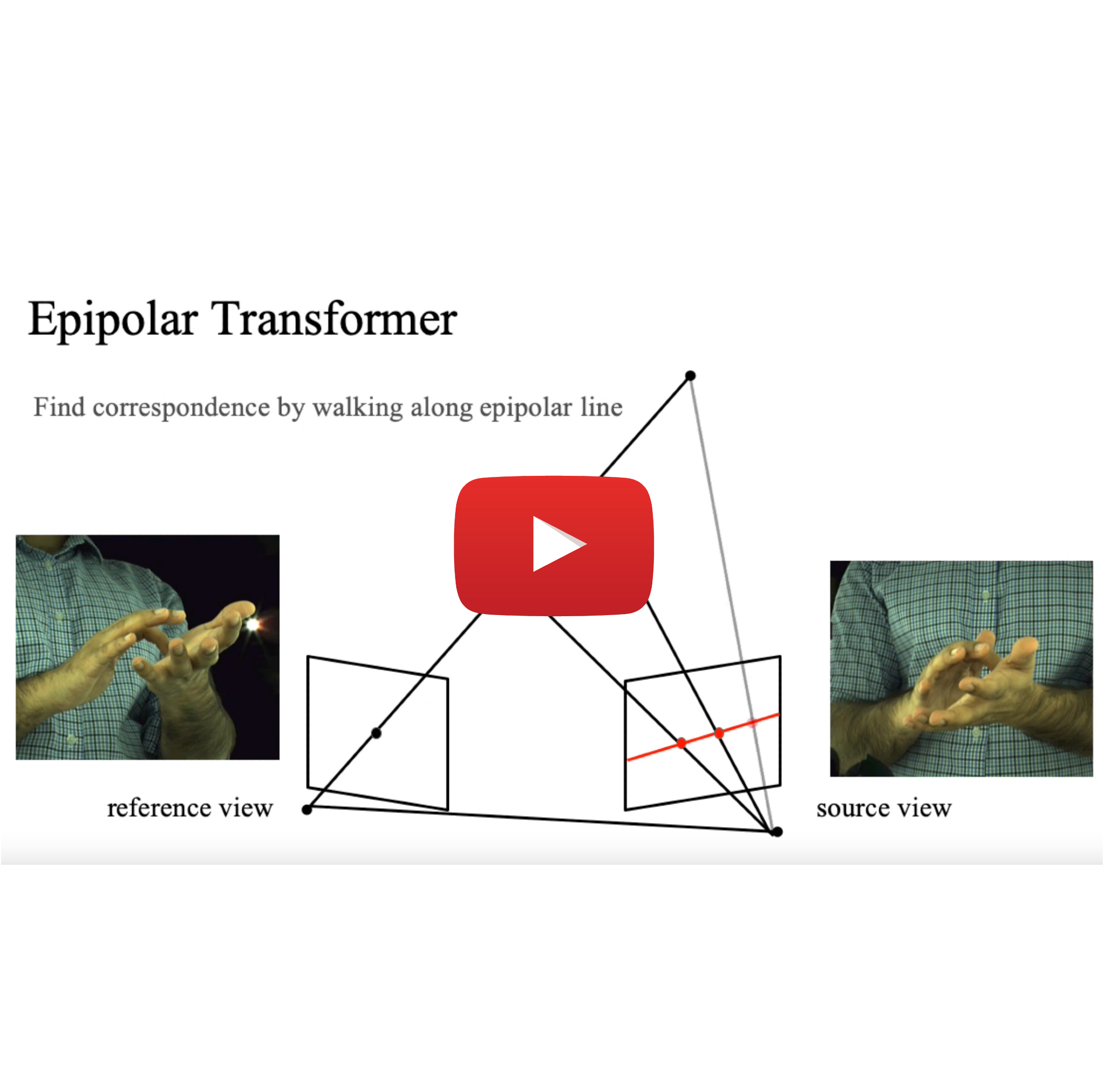
Epipolar Transformers (CVPR 2020)
Stars: ✭ 245
Projects that are alternatives of or similar to Epipolar Transformers
Pose Interpreter Networks
Real-Time Object Pose Estimation with Pose Interpreter Networks (IROS 2018)
Stars: ✭ 104 (-57.55%)
Mutual labels: jupyter-notebook, 3d, pose-estimation
Keras realtime multi Person pose estimation
Keras version of Realtime Multi-Person Pose Estimation project
Stars: ✭ 728 (+197.14%)
Mutual labels: jupyter-notebook, pose-estimation
Pytorch Openpose
pytorch implementation of openpose including Hand and Body Pose Estimation.
Stars: ✭ 716 (+192.24%)
Mutual labels: jupyter-notebook, pose-estimation
Objectron
Objectron is a dataset of short, object-centric video clips. In addition, the videos also contain AR session metadata including camera poses, sparse point-clouds and planes. In each video, the camera moves around and above the object and captures it from different views. Each object is annotated with a 3D bounding box. The 3D bounding box describes the object’s position, orientation, and dimensions. The dataset contains about 15K annotated video clips and 4M annotated images in the following categories: bikes, books, bottles, cameras, cereal boxes, chairs, cups, laptops, and shoes
Stars: ✭ 1,352 (+451.84%)
Mutual labels: jupyter-notebook, 3d
Mobilepose Pytorch
Light-weight Single Person Pose Estimator
Stars: ✭ 427 (+74.29%)
Mutual labels: jupyter-notebook, pose-estimation
Chinesetrafficpolicepose
Detects Chinese traffic police commanding poses 检测中国交警指挥手势
Stars: ✭ 49 (-80%)
Mutual labels: jupyter-notebook, pose-estimation
Pose Estimation tutorials
Tools and tutorials of pose estimation and deep learning
Stars: ✭ 79 (-67.76%)
Mutual labels: jupyter-notebook, pose-estimation
Tensorflow realtime multi Person pose estimation
Multi-Person Pose Estimation project for Tensorflow 2.0 with a small and fast model based on MobilenetV3
Stars: ✭ 129 (-47.35%)
Mutual labels: jupyter-notebook, pose-estimation
Cpm
Convolutional Pose Machines in TensorFlow
Stars: ✭ 115 (-53.06%)
Mutual labels: jupyter-notebook, pose-estimation
Iros20 6d Pose Tracking
[IROS 2020] se(3)-TrackNet: Data-driven 6D Pose Tracking by Calibrating Image Residuals in Synthetic Domains
Stars: ✭ 113 (-53.88%)
Mutual labels: 3d, pose-estimation
Amass
Data preparation and loader for AMASS
Stars: ✭ 180 (-26.53%)
Mutual labels: jupyter-notebook, pose-estimation
Rnn For Human Activity Recognition Using 2d Pose Input
Activity Recognition from 2D pose using an LSTM RNN
Stars: ✭ 165 (-32.65%)
Mutual labels: jupyter-notebook, pose-estimation
Human body prior
VPoser: Variational Human Pose Prior
Stars: ✭ 244 (-0.41%)
Mutual labels: jupyter-notebook, pose-estimation
Ml finance codes
Machine Learning in Finance: From Theory to Practice Book
Stars: ✭ 245 (+0%)
Mutual labels: jupyter-notebook
Building Machine Learning Projects With Tensorflow
Building Machine Learning Projects with TensorFlow by Packt
Stars: ✭ 247 (+0.82%)
Mutual labels: jupyter-notebook
Spinzero Jupyter Theme
A minimal Jupyter Notebook theme
Stars: ✭ 246 (+0.41%)
Mutual labels: jupyter-notebook
Parametric T Sne
Running parametric t-SNE by Laurens Van Der Maaten with Octave and oct2py.
Stars: ✭ 246 (+0.41%)
Mutual labels: jupyter-notebook
Wavegrad
Implementation of Google Brain's WaveGrad high-fidelity vocoder (paper: https://arxiv.org/pdf/2009.00713.pdf). First implementation on GitHub.
Stars: ✭ 245 (+0%)
Mutual labels: jupyter-notebook
Overcoming Catastrophic
Implementation of "Overcoming catastrophic forgetting in neural networks" in Tensorflow
Stars: ✭ 247 (+0.82%)
Mutual labels: jupyter-notebook
Bayesian Optimization
Python code for bayesian optimization using Gaussian processes
Stars: ✭ 245 (+0%)
Mutual labels: jupyter-notebook
Epipolar Transformers 
Yihui He, Rui Yan, Katerina Fragkiadaki, Shoou-I Yu (Carnegie Mellon University, Facebook Reality Labs)
CVPR 2020, CVPR workshop Best Paper Award
Oral presentation and human pose demo videos (playlist):

Models
We also provide 2D to 3D lifting network implementations for these two papers:
-
3D Hand Shape and Pose from Images in the Wild, CVPR 2019
-
configs/lifting/img_lifting_rot_h36m.yaml(Human 3.6M) -
configs/lifting/img_lifting_rot.yaml(RHD)
-
-
Learning to Estimate 3D Hand Pose from Single RGB Images, ICCV 2017
-
configs/lifting/lifting_direct_h36m.yaml(Human 3.6M) -
configs/lifting/lifting_direct.yaml(RHD)
-
Setup
Requirements
Python 3, pytorch > 1.2+ and pytorch < 1.4
pip install -r requirements.txt
conda install pytorch cudatoolkit=10.0 -c pytorch
Pretrained weights download
mkdir outs
cd datasets/
bash get_pretrained_models.sh
Please follow the instructions in datasets/README.md for preparing the dataset
Training
python main.py --cfg path/to/config
tensorboard --logdir outs/
Testing
Testing with latest checkpoints
python main.py --cfg configs/xxx.yaml DOTRAIN False
Testing with weights
python main.py --cfg configs/xxx.yaml DOTRAIN False WEIGHTS xxx.pth
Visualization
Epipolar Transformers Visualization

- Download the output pkls for non-augmented models and extract under
outs/ - Make sure
outs/epipolar/keypoint_h36m_fixed/visualizations/h36m/output_1.pklexists. - Use
scripts/vis_hm36_score.ipynb- To select a point, click on the reference view (upper left), the source view along with corresponding epipolar line, and the peaks for different feature matchings are shown at the bottom left.
Human 3.6M input visualization

python main.py --cfg configs/epipolar/keypoint_h36m.yaml DOTRAIN False DOTEST False EPIPOLAR.VIS True VIS.H36M True SOLVER.IMS_PER_BATCH 1
python main.py --cfg configs/epipolar/keypoint_h36m.yaml DOTRAIN False DOTEST False VIS.MULTIVIEWH36M True EPIPOLAR.VIS True SOLVER.IMS_PER_BATCH 1
Human 3.6M prediction visualization
# generate images
python main.py --cfg configs/epipolar/keypoint_h36m_zresidual_fixed.yaml DOTRAIN False DOTEST True VIS.VIDEO True DATASETS.H36M.TEST_SAMPLE 2
# generate images
python main.py --cfg configs/benchmark/keypoint_h36m.yaml DOTRAIN False DOTEST True VIS.VIDEO True DATASETS.H36M.TEST_SAMPLE 2
# use https://github.com/yihui-he/multiview-human-pose-estimation-pytorch to generate images for ICCV 19
python run/pose2d/valid.py --cfg experiments-local/mixed/resnet50/256_fusion.yaml # set test batch size to 1 and PRINT_FREQ to 2
# generate video
python scripts/video.py --src outs/epipolar/keypoint_h36m_fixed/video/multiview_h36m_val/
Citing Epipolar Transformers
If you find Epipolar Transformers helps your research, please cite the paper:
@inproceedings{epipolartransformers,
title={Epipolar Transformers},
author={He, Yihui and Yan, Rui and Fragkiadaki, Katerina and Yu, Shoou-I},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
pages={7779--7788},
year={2020}
}
FAQ
Please create a new issue.
Note that the project description data, including the texts, logos, images, and/or trademarks,
for each open source project belongs to its rightful owner.
If you wish to add or remove any projects, please contact us at [email protected].