YeeCY / Smplpp
Programming Languages
Labels
Projects that are alternatives of or similar to Smplpp
A C++ Implementation of SMPL - A Skinned Multi-Person Linear Model.

Overview
This project implements a 3D human skinning model - SMPL: A Skinned Multi-Person Linear Model with C++. The official SMPL model is available at http://smpl.is.tue.mpg.de.
The author-provided implementation based on Chumpy and OpenDR contains spaghetti code, and it cannot run on GPUs yet. I convert and update another Tensorflow version of SMPL contributed by CalciferZh to C++ style. You can find the Tensorflow implementation here. However, Tensorflow C++ APIs are not user-friendly, so I choose the Pytorch C++ APIs - libTorch - instead.
For more details, see the paper published by Max Planck Institute for Intelligent Systems on SIGGRAPH ASIA 2015.
Prerequisites
I have tested the codes on my machine, but I'm not sure the performance on other environments.
-
GPU
NVIDIA GeForce GTX 960M
-
OS
Ubuntu 18.04 LTS
-
Packages
-
xtensor: A C++ library meant for numerical analysis with multi-dimensional array expressions.
A C++ interpretation of Numpy, you can even find functions with similar names in it. A [cheat sheet (https://xtensor.readthedocs.io/en/latest/) from Numpy to Xtensor is helpful.
Currently, I only use Xtensor as an IO interface for module testing with random inputs and restoring hyperparameters in JSON format. Share the buffer of an Xtensor array with a corresponding PyTorch tensor is straightforward.
-
nlohmann_json: JSON for Modern C++.
Xtensor loads data from and dumps data into JSONs through nlohmann's toolkit.
-
libTorch: Pytorch C++ API.
PyTorch C++ API simplifies tensor computing and introduces GPU acceleration to this work, using CUDA and cuDNN.
Note: I installed the nightly version of libTorch with CUDA 10.0 support.
-
CUDA: NVIDIA parallel computing platform.
CUDA 10.0 works well on my machine. I think the other versions fit the libTorch download list should work as well.
-
CMake: A tool to build, test and pack up C++ program.
The CMake installed by
apt-getis CMake 3.5.1 which causes a failure when libTorch tries to find CUDA. A description of the issue: https://discuss.pytorch.org/t/install-libtorch-error-pytorch-c-api/26756/2You should update it to a newer version, such as 3.13.4 (>=3.12.2 should work). Delete the old CMake completely, download the latest official source codes, and build it from scratch.
Build on Linux
-
Package Installation
Here are procedures to install packages into the root directory correctly. If you want to link libraries manually, skip this part and install the following packages in the usual ways — official documentation and Google helps a lot.
-
Source Code
Compile libraries and headers into the root directory, e.g., Xtensor:
-
create a directory in the Xtensor repo you have just cloned from Github to build the package.
cd <xtensor-dir> mkdir build cd build -
configure CMake and generate Makefiles. Remember to redirect the installation directory to the root.
cmake -D CMAKE_INSTALL_PREFIX=/usr/local ..The "/usr/local" can be replaced with any other locations as long as CMake can find the package automatically.
-
compile and install.
make -j#X# sudo make install#X#is the number of threads specified by yourself.
-
Binary Library
Move pre-built packages into the root directory, e.g., libTorch:
-
redirect into the libTorch directory.
cd <libTorch-dir> -
copy CMake configurations to the "lib" directory.
cp -rv share/cmake lib -
copy headers and libraries to the root directory.
cp -rv include lib /usr/localAfterward, you won't need to specify the path to the libTorch library manually whenever building
libTorch-dependent projects with CMake. The operations are a little bit different from the official guidance.
-
-
Data preprocessing
Download and extract the official data from http://smpl.is.tue.mpg.de/, you will get two files:
basicModel_f_lbs_10_207_0_v1.0.0.pkl basicmodel_m_lbs_10_207_0_v1.0.0.pklRun
preprocess.pyin SMPL/scripts with Python 2 to convert the data into.jsonand. npzformat. If you change the location of these data, remember to edit themain.cppas well since I have hardcoded the paths.Note: If you have a strange mesh visualization, remember to double-check the face indices. (MeshLab favors the face indices starting from 1. However, this rule may not be compatible with other software.)
-
Build and Run
After installing all packages, you can compile SMPL++ from source:
mkdir build cd build cmake .. makeThese commands produce an executable program named as "smplpp". To run it, just type
./smplppin the terminal.
To track the usage of GPUs, use the following command:
nvidia-smi -lms
Build on Window
Follow these steps: https://github.com/YeeCY/SMPLpp/issues/5#issue-492889787.
Instructions
The project is simply a raw framework for SMPL++. I have written many comments in the source codes, but there may be some typoes. Sorry about that.
-
Forward Propagation
SMPL++ implements a part of the algorithm described in the paper. The inputs of the system are shape coefficients \beta, pose axis-angle parameterization \theta, and body translation \vec{t}. Each of them controls a trait of the body mesh.
Note: Backward propagation has not been available yet.
-
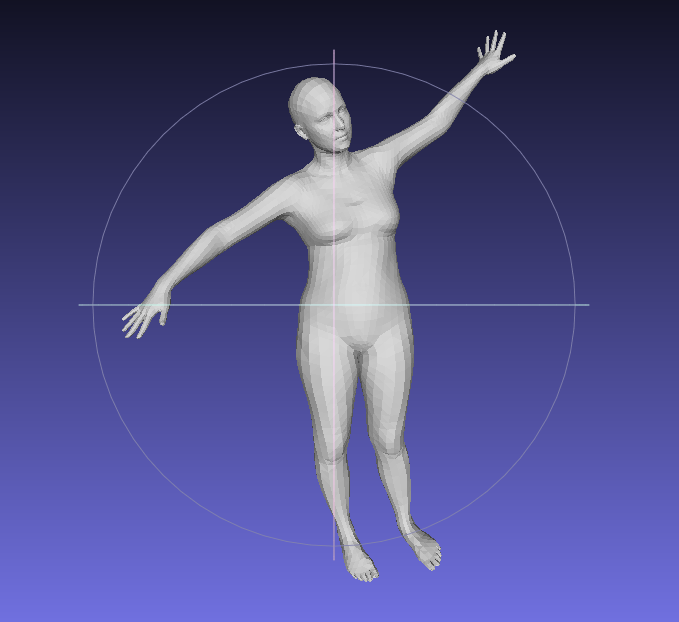
Render Meshes
I don't have a GUI to render the output now! If you would like to see the meshes, try to render them in MeshLab.
-
Pipeline
Following the paper, we can generate a mesh with four steps.
-
Generate pose blend shape and shape blend shape.
-
Regress joints from vertices.
-
Compute the transformation matrices for each joint.
-
Linear Blend Skinning
-
-
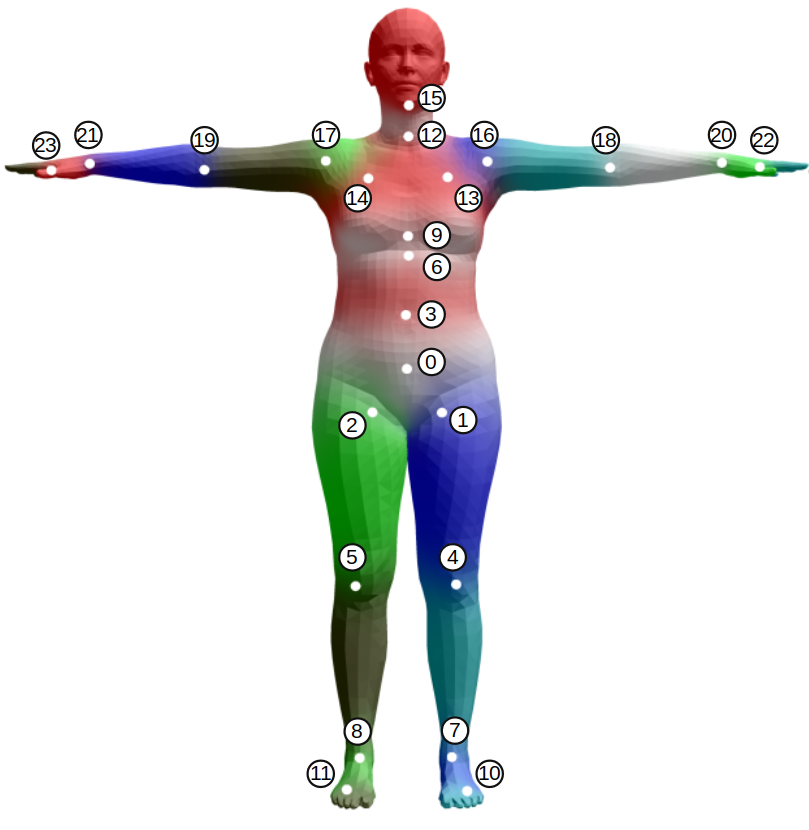
Kinematic Tree
An kinematic tree for SMPL looks like this:


TODO
-
[x] Hyperparameters restore from
.npzfiles instead of.jsonfiles. (.jsonneither saves storage nor performances efficiently when being imported.)Update: I have uploaded a script to convert data from official
.pkl, check the fold SMPL++/scripts for more details. -
[ ] A OpenGL GUI to render and manipulate the 3D mesh.
-
[ ] Fit the 3D mesh to a 2D image - SMPLify.
-
[ ] Export SMPL++ into static or dynamic library.
-
[ ] A trainable SMPL.
Note: The importance of each demand decreases in this list.
Misc
If you find any problem, error, or even typo, feel free to contact me.
SMPL++ is for research purposes only. Any commercial usage should be allowed by original authors.
Links
[1] Official Website of SMPL: http://smpl.is.tue.mpg.de.
[2] Official Website of SMPLify: http://smplify.is.tue.mpg.de.