openTCS4.17src
![]()
![]()


介绍
开源的交通控制系统,可用于AGV的交通管制系统
使用方式
详情访问 OpenTCS Page
推荐使用IDEA,打开此项目后等待gradle加载完毕
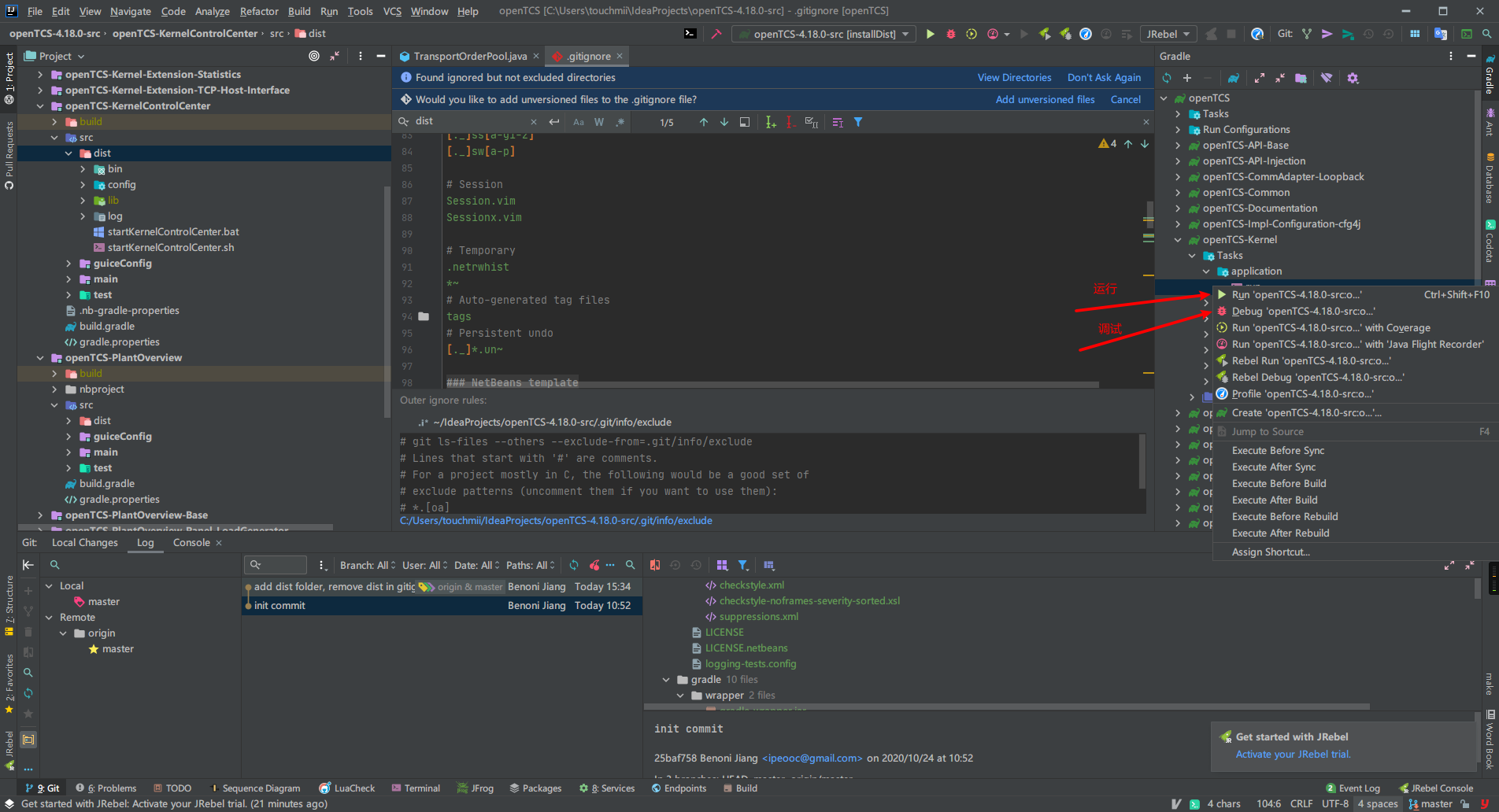
根据上图箭头指示运行Kernel和PlantView,如果是调试的话就选择Debug
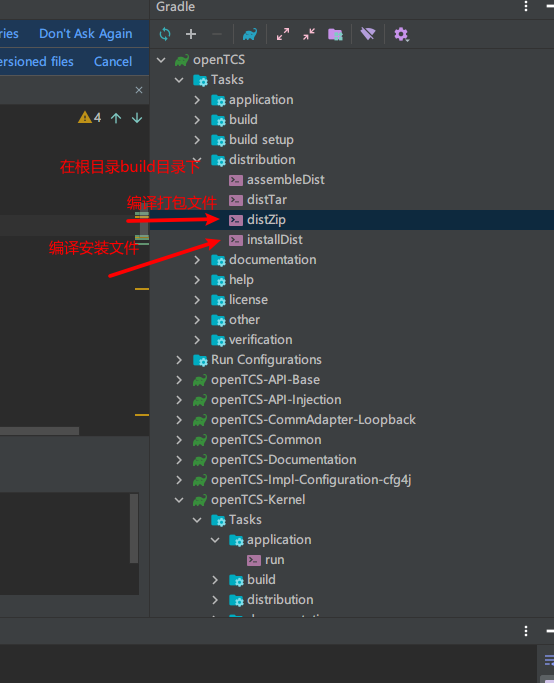
如要打包程序可选择上图Task里的installDist或Zip,可生成独立运行的程序,如需在其它电脑运行此程序需安装java 8版本的JDK或JRE
####WebClient启动
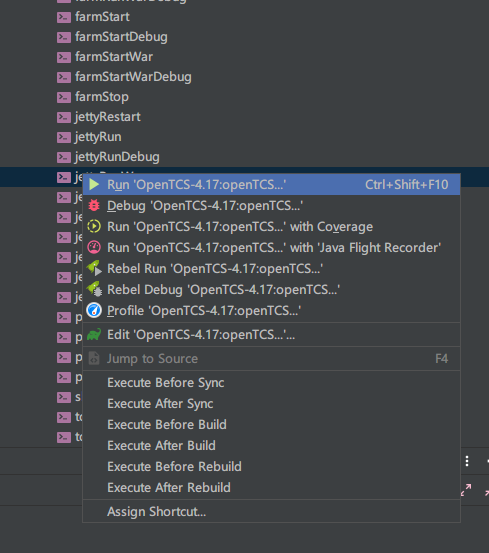
在gradle里面找到openTCS-WebClient->gretty->jettyRunWar,右键选择运行即可,在浏览器里面打开http://localhost:8090/Demo
 )
)
修改部分
添加Modbus驱动
路径发送改为整段路径发送,路径格式为x,y坐标点
长路路径运行时遇到通讯中断无法按照顺序报告走完的点,需修改DefaultVehicleController内命令执行完毕的判断规则
新增Maven支持
WebClient因依赖问题暂时无法使用
使用mvn package可编译项目 运行Kernel mvn exec:exec@runkernel -f openTCS-Kernel/pom.xml
使用界面调试工具 mvn exec:exec@swingexplorer -f openTCS-Kernel/pom.xml
运行PlantOverview mvn exec:exec@runplantoverview -f openTCS-PlantOverview/pom.xml
使用界面调试工具 mvn exec:exec@swingexplorer -f openTCS-PlantOverview/pom.xml
使用maven需要安装swingexplorer core 和 agent包, 暂时不支持直接引用,使用mvn install命令来安装