classical-SLAM
一些经典的SLAM算法学习并注释的版本
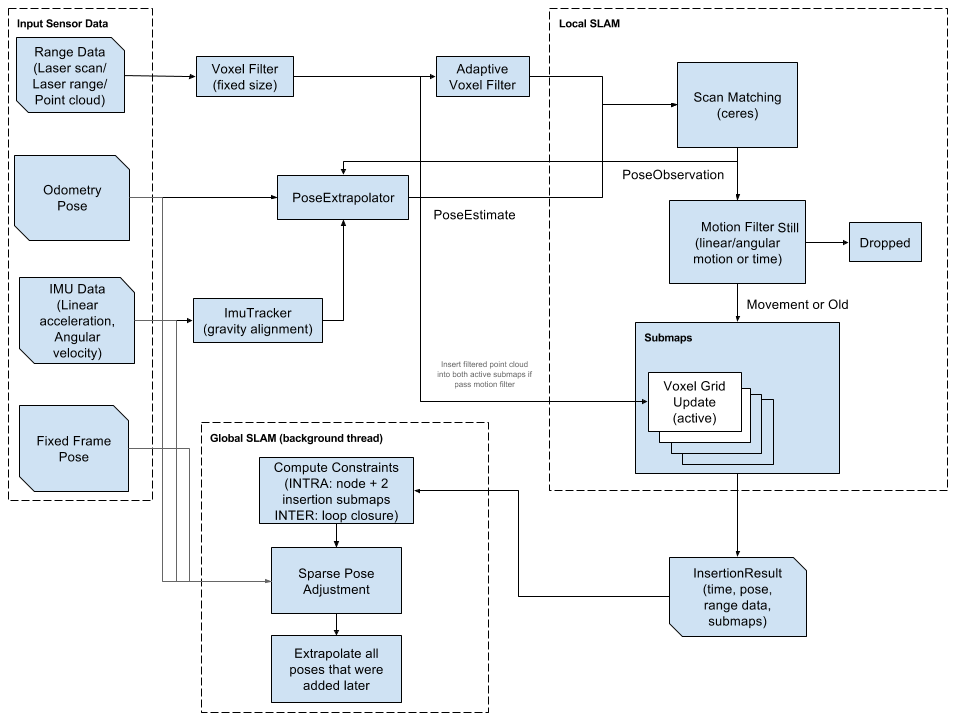
Google cartographer
Cartographer is a system that provides real-time simultaneous localization and mapping (SLAM) in 2D and 3D across multiple platforms and sensor configurations.
ORB-SLAM 框架
-
ORB-SLAM
-
ORB-SLAM2
ORB-SLAM2代码
特点: tracking, local mapping, loop closing 三线程
- ORB-SLAM2with_pointcloud_map
ORB-SLAM2with_pointcloud_map代码
特点: 在tracking, local mapping, loop closing 三线程的基础上,增加了semantic segmentation, dense mapping threads.
- DS-SLAM(A Semantic Visual SLAM towards Dynamic Environments)
论文 代码
特点:在ORB-SLAM2with_pointcloud_map的基础上,增加了SegNet(pixel-wise semantic segmentation based on caffe in real-time)
VINS 框架
- VINS-Fusion
VINS-Fusion代码 VINS-Fusion is an optimization-based multi-sensor state estimator, which achieves accurate self-localization for autonomous applications (drones, cars, and AR/VR). VINS-Fusion is an extension of VINS-Mono, which supports multiple visual-inertial sensor types (mono camera + IMU, stereo cameras + IMU, even stereo cameras only). We also show a toy example of fusing VINS with GPS
MSCKF 框架
The MSCKF_VIO package is a stereo version of MSCKF. The software takes in synchronized stereo images and IMU messages and generates real-time 6DOF pose estimation of the IMU frame.
- [SR-ISWF -an extension of MSCKF]