Computer-Vision-Project
- Computer-Vision-Project
- 2. Project structure
- 3. Run the project
- 4. Experiments
- Conclusion
- References
1.1 Introduction
The goal of this project was to develop a Face Recognition application using a Local Binary Pattern approach and, using the same approach, develop a real time Face Recognition application.
At high level the system is able, with a set of familiar faces, to recognize with a certain accuracy a new face. To do this, different methods were used in order to compare the results in terms of accuracy.
This project was developed for Computer Vision course at University of Cagliari, supervised by prof. Giovanni Puglisi.
1.2 Used tools
Most of the project has been developed using Python as programming language, open source libraries and open source datasets. In particular it's been used:
- Python 2.7.14
- OpenCV
- Scikit-learn
- Extended Yale B Faces Dataset
- Pil
Extended Yale B Faces Dataset includes 2414 frontal pictures of faces belonging to 38 different subjects. For each subject there are 64 photos taken in different light conditions.
Non open source tools:
- Matlab
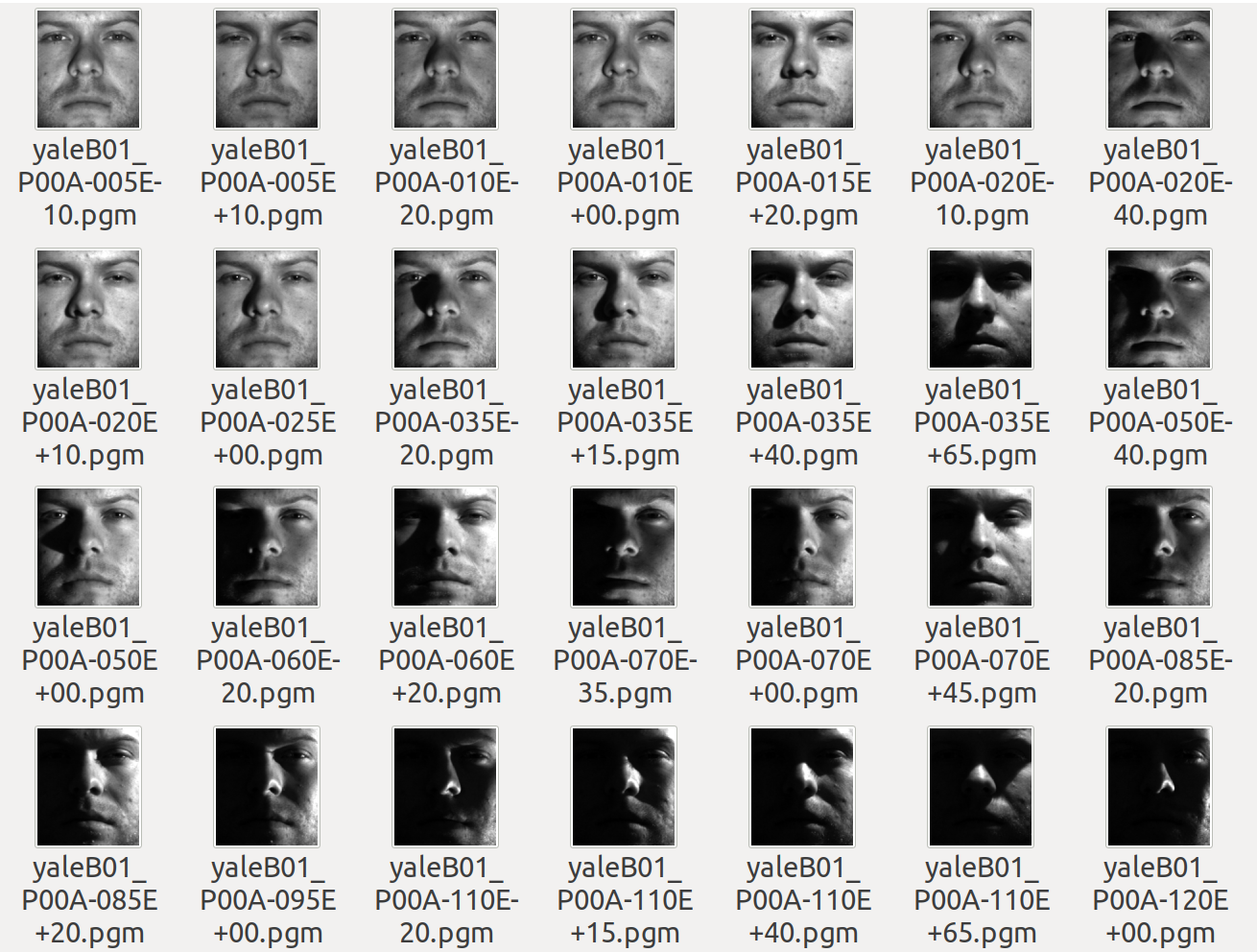
Picture 1: the Yale Faces Dataset B
1.3 Face Recognition problem
Over the last ten years or so, face recognition has become a popular area of research in computer vision and one of the most successful applications of image analysis and understanding. A facial recognition system is a technology capable of identifying or verifying a person from a digital image or a video frame from a video source. For a human is very easy to perform the face recognition process but the same process is not easy for a computer. Computers have to deal with numerous interfering factors related to treatment of images such as: wide chromatic variations and different angles of view. Beyond this there are other factors that can be affect the face recognition process like: occlusion, hair style, glasses, facial expression etc.
There are multiples methods in which facial recognition systems work, but in general, they work by comparing selected facial features from given image with faces within a database.
1.4 Local Binary Pattern
Local binary patterns (LBP) is a type of visual descriptor used for classification in computer vision. In this project LBP operator was used to filter the features of facial textures.
LBP transforms image blocks into an array of labels. Such labels (or their statistics, for example histograms) are used as features. Various versions have been developed in the state of the art.
In the basic version of the LBP we consider the values of a 3x3 pixel neighborhood. For each pixel in a cell, compare the pixel to each of its 8 neighbors (on its left-top, left-middle, left-bottom, right-top, etc.). Follow the pixels along a circle, i.e. clockwise or counter-clockwise. Where the center pixel's value is greater than the neighbor's value, write "0". Otherwise, write "1". This gives an 8-digit binary number (which is usually converted to decimal for convenience).
In its generalized version, each pixel is considered in a circular neighborhood of P points with radius r. If the elements do not fall on a single pixel, their values are obtained by interpolation. Generally the number of neighboring pixels chosen is 8.
In this project a multi-blocks LBP were used.
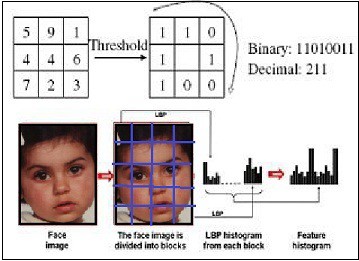
Picture 2: an example of multi block Local Binary Pattern
2. Project structure
In this chapter we'll be discuss the project structure and his general function.
Computer-Vision-Project
│ LICENSE
│ README.md
│ main.py
│ rotate.py
│
└─── algorithms
│ LBP.py
|
└─── model
│ (here will be knn/naivebayes/svm.pkl)
|
└─── utils
│ dataset.py
│ utils.py
|
└─── RealTime (subproject)
| utils
│ │ utils.py
| ------------------
│ create_data.py
│ face_recognize.py
│ haarcascade_frontalface_default.xml
The folder that starting with a capital letter represents a sub-project, the other folders are used to store the different libraries.
In the root folder there are the algorithms folder, where there is the basic Local Binary Pattern implementation made by myself. The datasets folder contain the zips of the datasets used to test the project. In the model folder will be saved training data values, in order to perform the prediction without training the classifier again. In the utils folder there are some helper function.
The Realtime folder contain the sub-project that perform a real time face recognition using the pc camera. It contain two main scripts: create_data.py that generate the dataset shooting some photos using the camera. face_recognize.py train the classifier and perform the real time face recognition. More details will be given in the next chapters.
3. Run the project
3.1 Install dependencies
In order to run, test and modify the source code must be installed the following packages.
#CV2
sudo apt-get install python-opencv
#PIP
sudo apt-get install python-pip
pip install Pillow
# SKLEARN
pip install -U scikit-learn
sudo apt-get install build-essential python3-dev python3-setuptools
sudo apt-get install python3-numpy python3-scipy
sudo apt-get install libopenblas-dev
# DLIB
sudo apt-get install build-essential cmake
sudo apt-get install libgtk-3-dev
sudo apt-get install libboost-all-dev
# OTHER
sudo pip install scikit-image
sudo pip install dlib3.2 Run Main project
First of all you have to unzip the YaleFaces.zip and YaleFaces_small.
Launch the python main.py with the following parameters:
--dataset [datasetName]
--classifier [svm, knn, naivebayes]
--training
--histEq
--output
By default launching only python main.py the script use YaleFaces dataset without training (loading from model folder). If there are not model in your model folder you must use --training.
--histEq is helpful because perform an histogram equalization before calculating the LBP.
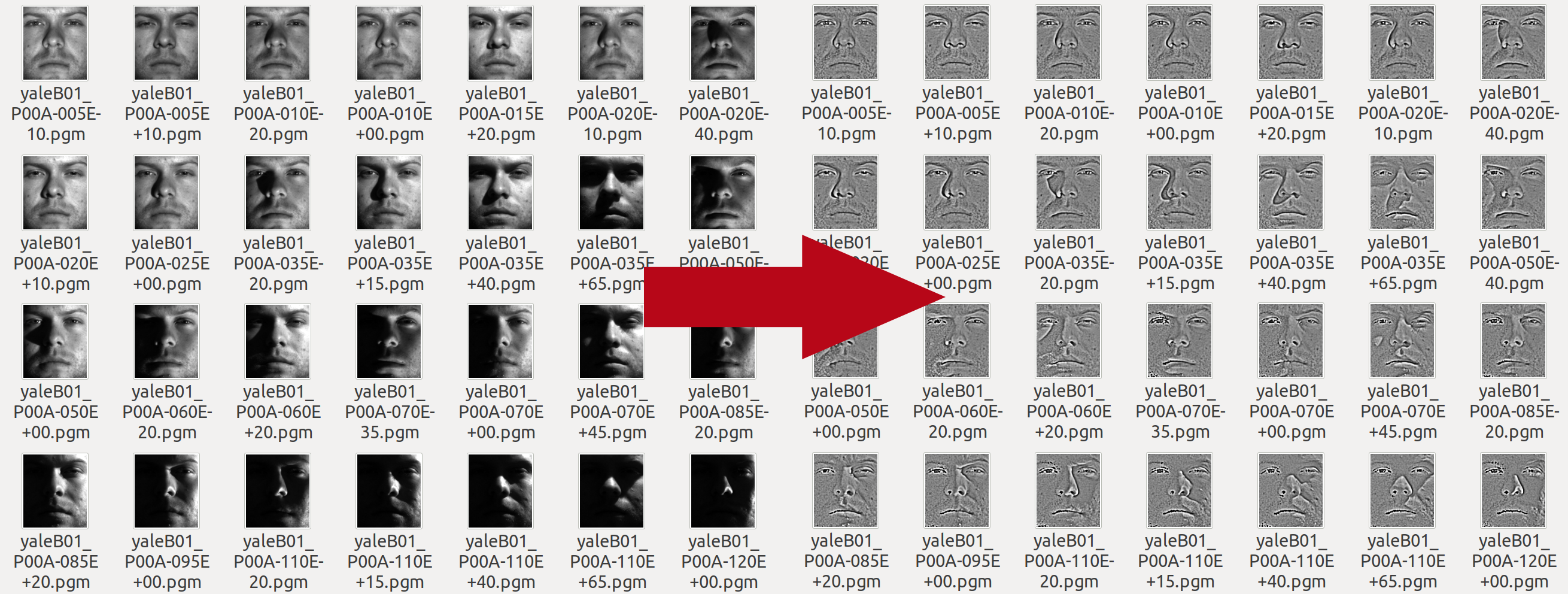
If --output is setted the script will produce inside ./datasets/your_chosen_algorithm_/your_chosen_dataset/ the PNG of the LBP calculated for each image.
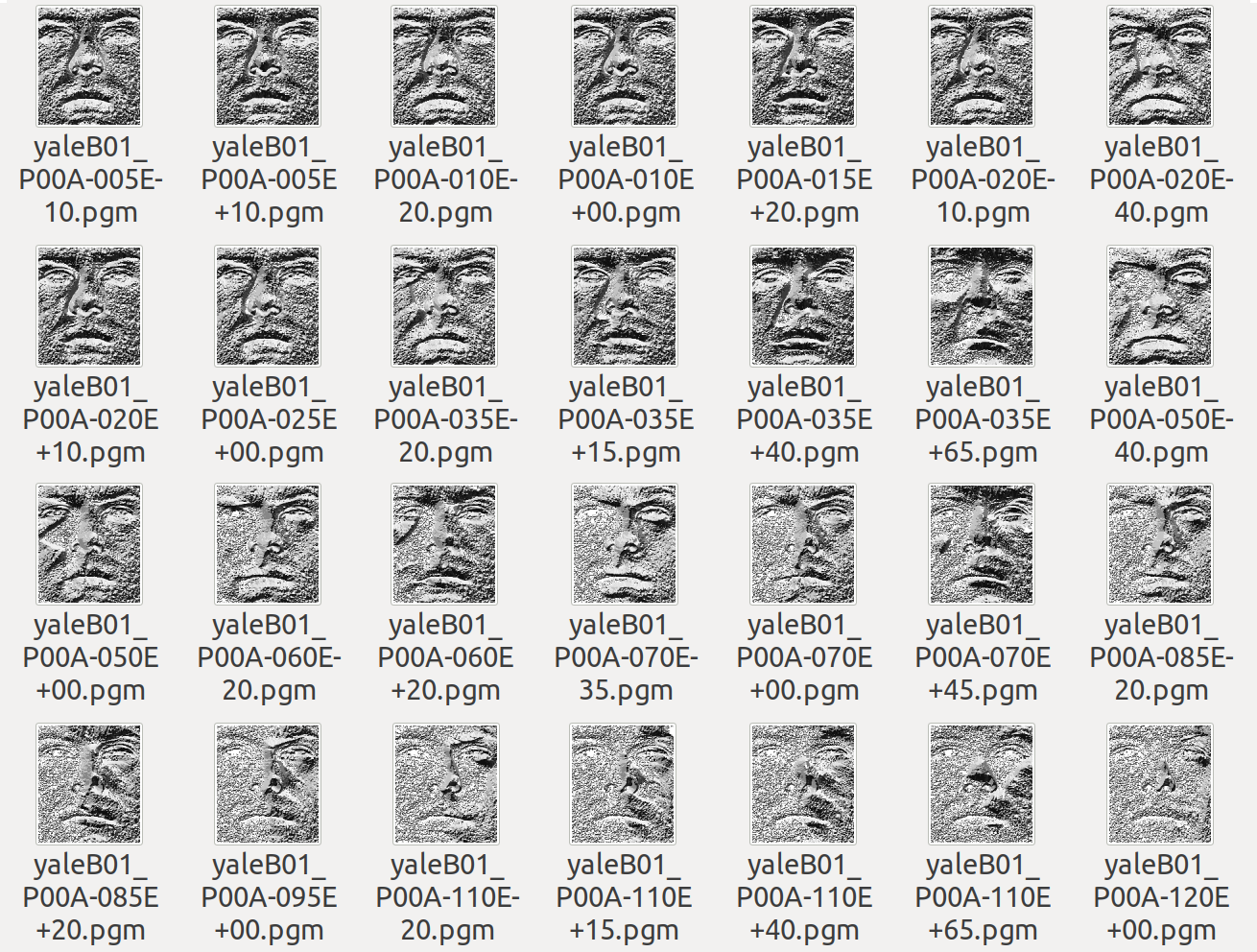
Picture 3: the LBP result on Yale Faces Dataset
With --classifier you can choose which classifier to use between SVM, KNN and NaiveBayes (obviously for each classifier you must perform the training of the model).
By default LBP is performed splitting the images in 12x12 blocks.
Usage example
python main.py --dataset YaleFaces --classifier svm
python main.py --training --output --histEq
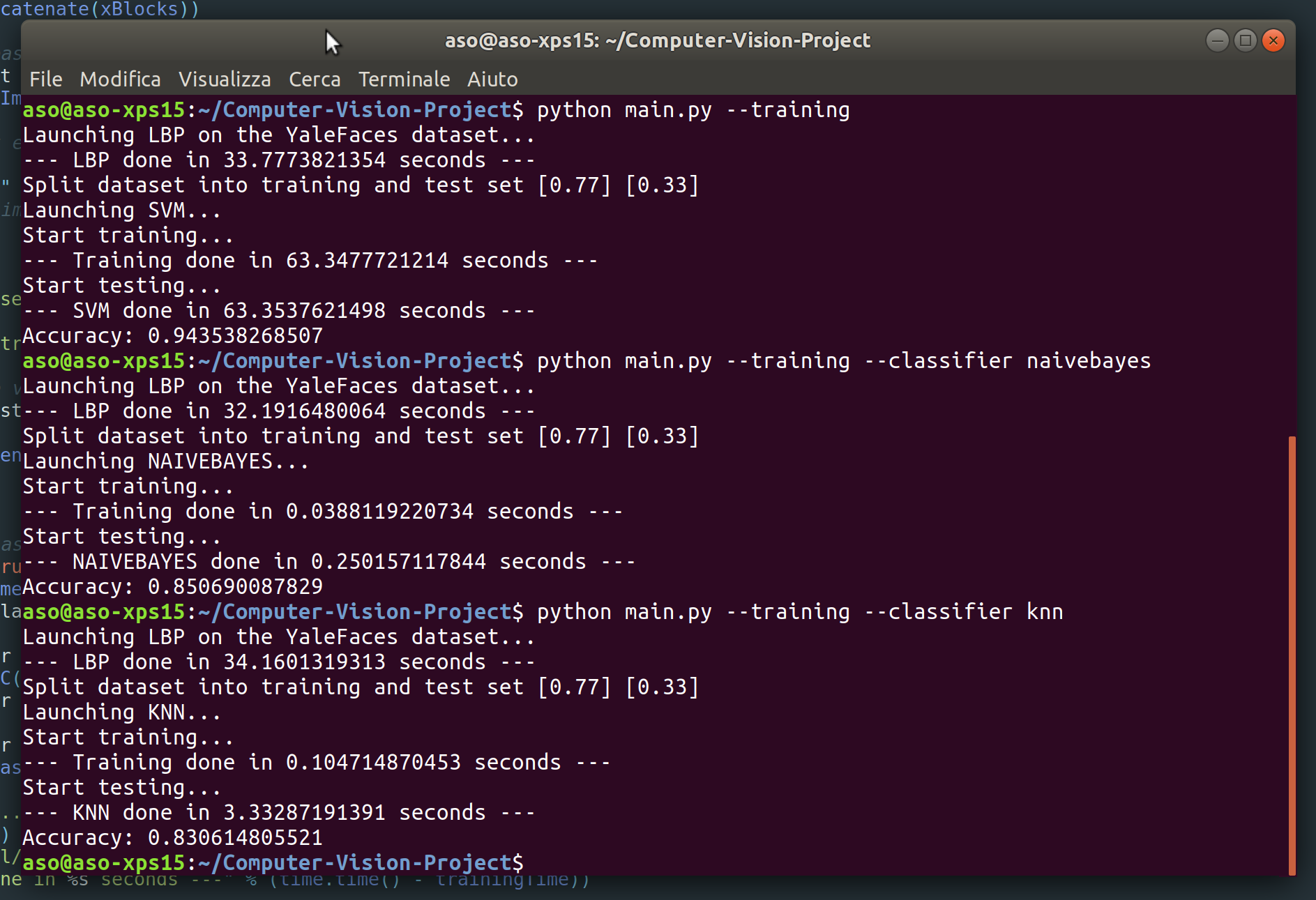
Picture 4: screenshot of main.py script
3.3 Run Real Time project
This section basically work in two steps:
- Creation of the dataset
- Training and real time classification
First of all launch the python create_data.py with the following parameters:
--nameLaunching the script it will create inside ./datasets/CHOOSEN_NAME/ some photos shooted using the PC camera. The script use CascadeClassifierin order to perform Face Detection and cut out the face rettangle. Currently I choose to save 30 photos per subject.
Now is it possible to perform Face Recognition in real time launching python face_recognize.py with the following parameters:
--algorithm [lbp, fisherface]The script, first of all, use the previously created dataset to train the classifier. If LBP is chosen it will be used SVM as classifier, else is used a general default CV2 classifier.
After the training, CascadeClassifier is used to identify the face inside the scene and, when a face is identified, the classifier try to recognize it.
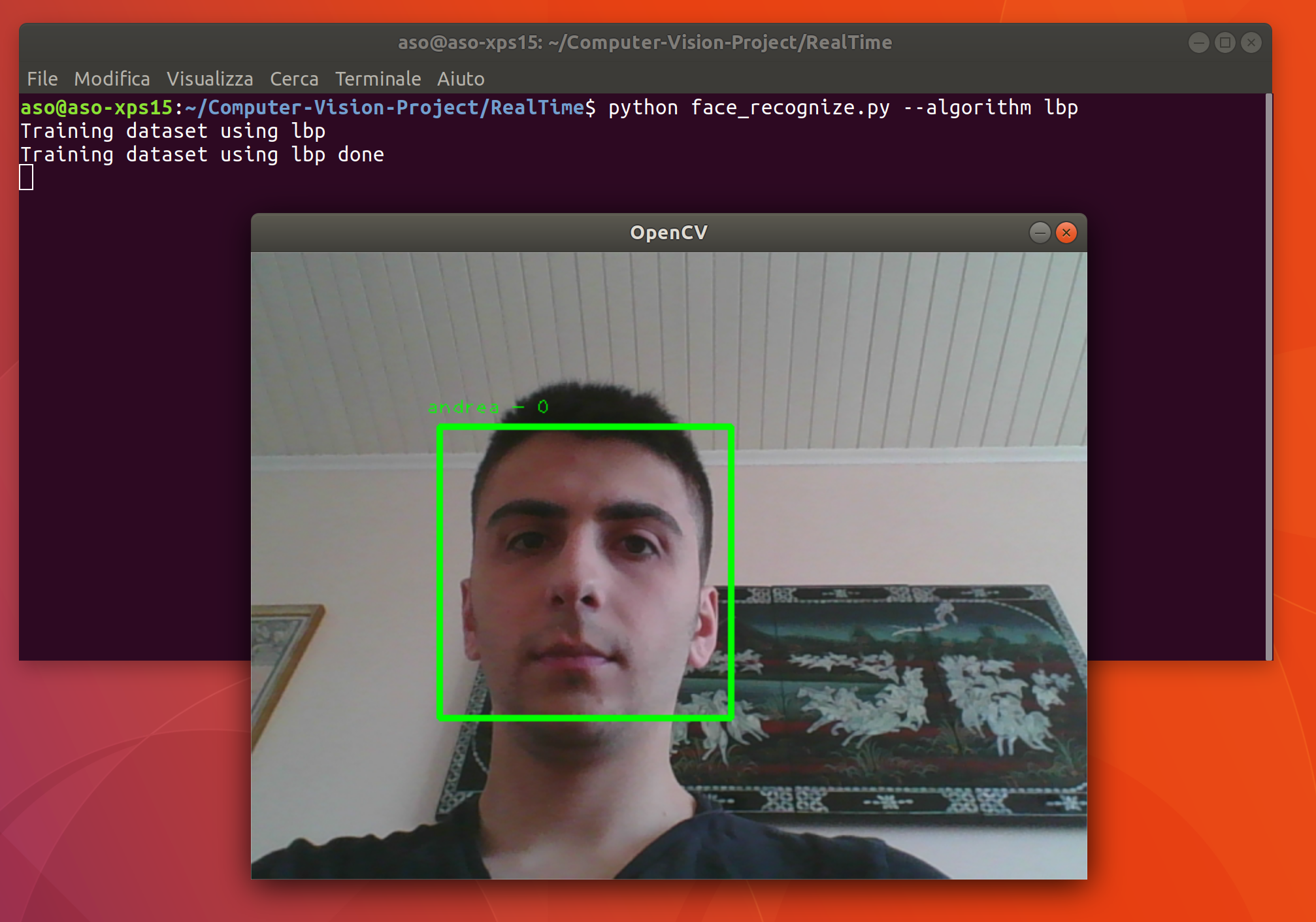
Picture 5: a screenshot of real time application
3.4 Normalization Illumination
Starting by this paper: Enhanced Local Texture Feature Sets for Face Recognition under Difficult Lighting Conditions (authors page: Xiaoyang Tan's Publications) and his open source matlab code I perfomed a normalization of lighting as you can see in the picture.
Picture 6: the result of Normalization Illumination
4. Experiments
4.1 Main project
The features extraction methods and the accuracy was tested changing:
- Classifier
- The blocks size of LBP
- Performing the normalization of illumination
The tests were done splitting the dataset 77% for training and 33% for tests. The final values is the result of the average value of 5 tests with different training/test set.
Below there are my results obtained with YaleFaces dataset using this PC: Dell XPS 15 9550, with Intel i7 6700HQ Skylake @ 2.60GHz.
Test with 3x3 blocks using LBP
Average time for calculating the LBP: 14 seconds.
| Classifier | Accuracy without histogram equalization | Accuracy with histogram equalization | Accuracy with Normalization Illumination |
|---|---|---|---|
| LinearSVM | 0.05 | 0.07 | 0.05 |
| KNN | 0.48 | 0.48 | 0.69 |
| NaiveBayes | 0.35 | 0.37 | 0.66 |
All classifiers get poor result without the Matlab scripts. With this blocks size LinearSVM always get the worst results.
Test with 6x6 blocks using LBP
Average time for calculating the LBP: 18 seconds.
| Classifier | Accuracy without histogram equalization | Accuracy with histogram equalization | Accuracy with Normalization Illumination |
|---|---|---|---|
| LinearSVM | 0.40 | 0.55 | 0.40 |
| KNN | 0.65 | 0.66 | 0.90 |
| NaiveBayes | 0.70 | 0.70 | 0.93 |
With normalization illumination the accuracy using SVM is very variable. It get an accuracy starting by 0.33 to 0.49. Also the other classifier is very variable, but not so much. In general NaiveBayes get the best result in all conditions.
Test with 12x12 blocks using LBP
Average time for calculating the LBP: 32 seconds.
| Classifier | Accuracy without histogram equalization | Accuracy with histogram equalization | Accuracy with Normalization Illumination |
|---|---|---|---|
| LinearSVM | 0.94 | 0.95 | 0.99 |
| KNN | 0.81 | 0.81 | 0.97 |
| NaiveBayes | 0.82 | 0.83 | 0.96 |
In this case linear SVM get the best results and using the normalization script we come close to the 100%.
In general the first thing that can be notice is that splitting the images into blocks in order to calculate the LBP is essential to obtain satisfactory results.
Splitting the images into 12*12 get the best results.
Normalize the lighting improve the classifier score in the most of the case, except for the LinearSVM with larger block size (3x3 and 6x6).
KNN get average score, but we must specify that this classifier is instance based, so it is not good in a realistic case. Some faces can't be classified if there are not a very similar element in the training set.
NaiveBayes at least, get a good result in many different case. Splitting the images in 12x12 blocks it get worse result than LinearSVM (without Normalization Illumination) yes, but still get good result with smaller blocks.
4.2 Real time project
Several tests have been done in order to test the performance of Local Binary Pattern approach with Linear SVM classifier in a real-time scenario.
In particular, have been tested these situations:
- With only two persons stored in the dataset:
- recognize one subject in normal light condition
- recognize one subject in normal light condition but adding some occlusions (glasses, scarves, etc.)
- the previous situations but changing the light condition
- With more than two persons stored in the dataset:
- recognize one subject in normal light condition
- recognize one subject in normal light condition but adding some occlusions (glasses, scarves, etc.)
- recognize two subjects in the same scene in normal light condition
- recognize two subjects in the same scene but adding some occlusions (glasses, scarves, etc.)
In summary we can say that the LBP work very good in the both case with normal light condition. If the light is good as the training set photos, the algorithm recognizes the faces even if the subject moves his head a few degrees.
Also adding some occlusions the algorithm seem work properly, in fact it is notable one thing: if the occlusion isn't very big the classifier recognizes the face; if the occlusion is too intrusive the face detection algorithm doesn't find the face so it's not even launched the classifier.
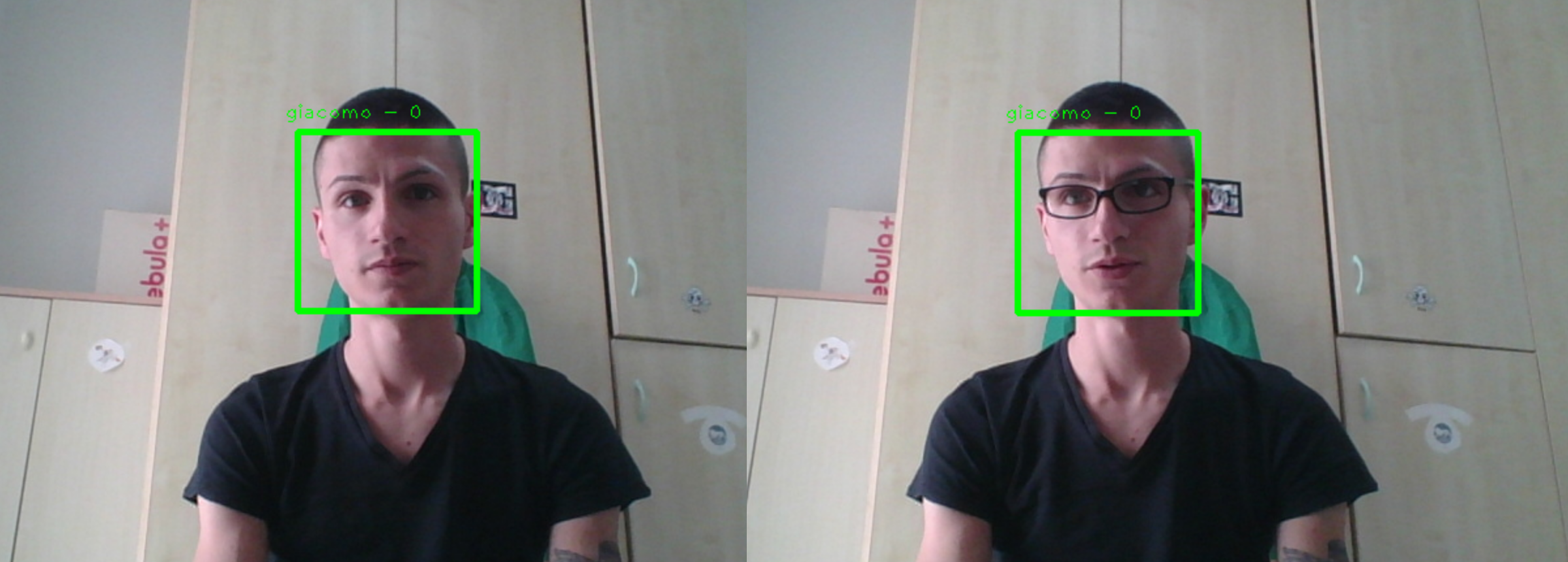
Picture 7: test with occlusion
The classification becomes less accurate when other subjects are added into the dataset and into the scene.
Adding more faces in the dataset leads a more complex training process and more complex classification. In this case is it possible to see the limits of LBP in the real time case.
A person can't be perfectly still, so even a small movement that produce a little light variation can produce significant changes at low level processing and obtain a not accurate classification.
But adding more subjects into the scene with a small dataset produce anyway a very good result.
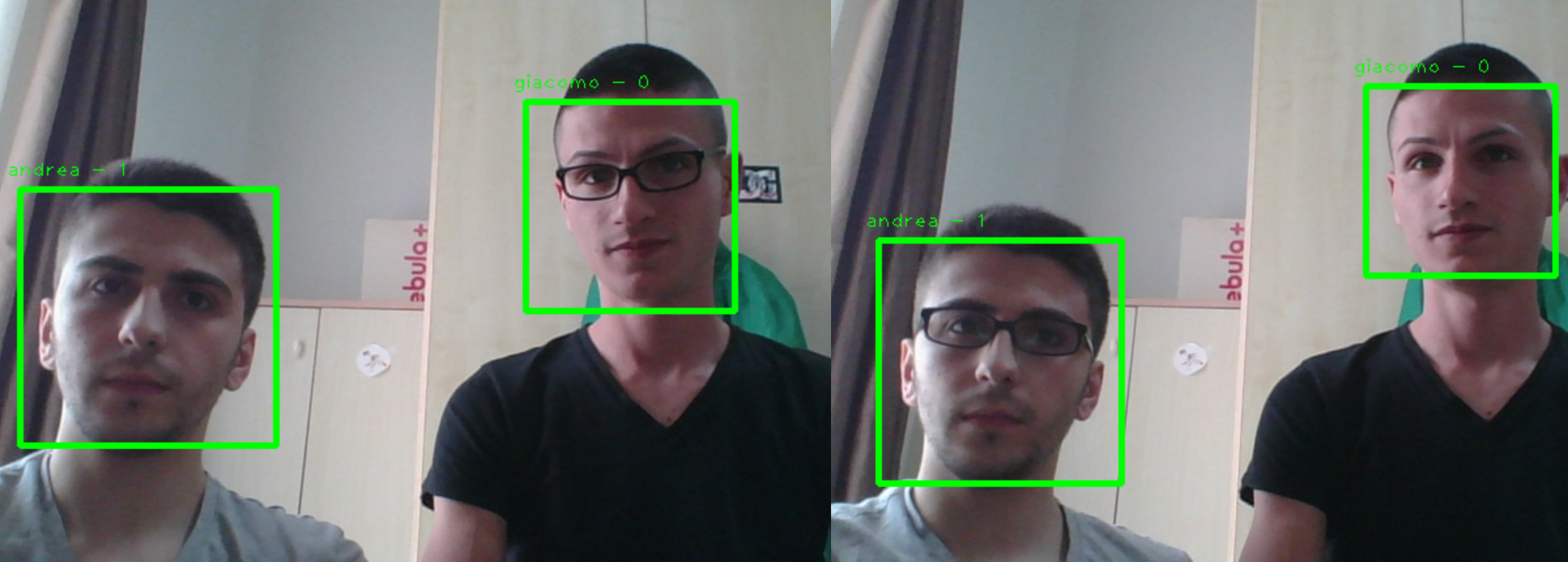
Picture 8: occlusion test with 2 subjects into the scene
As you can see at Picture 8, even adding an occlusion the classifier work very good with no flickering or bad classification (in most of the case).
The same case visible at Picture 8 with more classes into the dataset produce a very variant and inaccurate results confirming the thesis that the small movement in the scene produce a little light variation in the faces that can lead a bad classification.
Conclusion
The goal of this project was to develop a Face Recognition application using a Local Binary Pattern approach and after that, using the same approach, develop a real time Face Recognition application.
The goal can be considered achieved with excellent results.
In general we can say that LinearSVM perform the best results but need to split the images in very small blocks (at least 12x12 blocks) and the scene must be under control. These compromises are burdensome in terms of computational load.
With different and smaller blocks size LinearSVM get the worse result if compared with KNN and NaiveBayes.
NaiveBayes work good in the most of the case, even if we split the images with large blocks (3x3).
References
- [1] X.Tan and B.Triggs, Enhanced Local Texture Feature Sets for Face Recognition under Difficult Lighting Conditions, IEEE Transactions on Image Processing, 19(6), 1635-1650,2010.
- [2] T. Ojala, M. Pietikainen and T. Maenpaa, "Multiresolution gray-scale and rotation invariant texture classification with local binary patterns," in IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 24, no. 7, pp. 971-987, Jul 2002.
- [3] Timo Ahonen, Student Member, IEEE, Abdenour Hadid, and Matti Pietika ̈inen, Senior Member, IEEE: Face Description with Local Binary Patterns: Application to Face Recognition