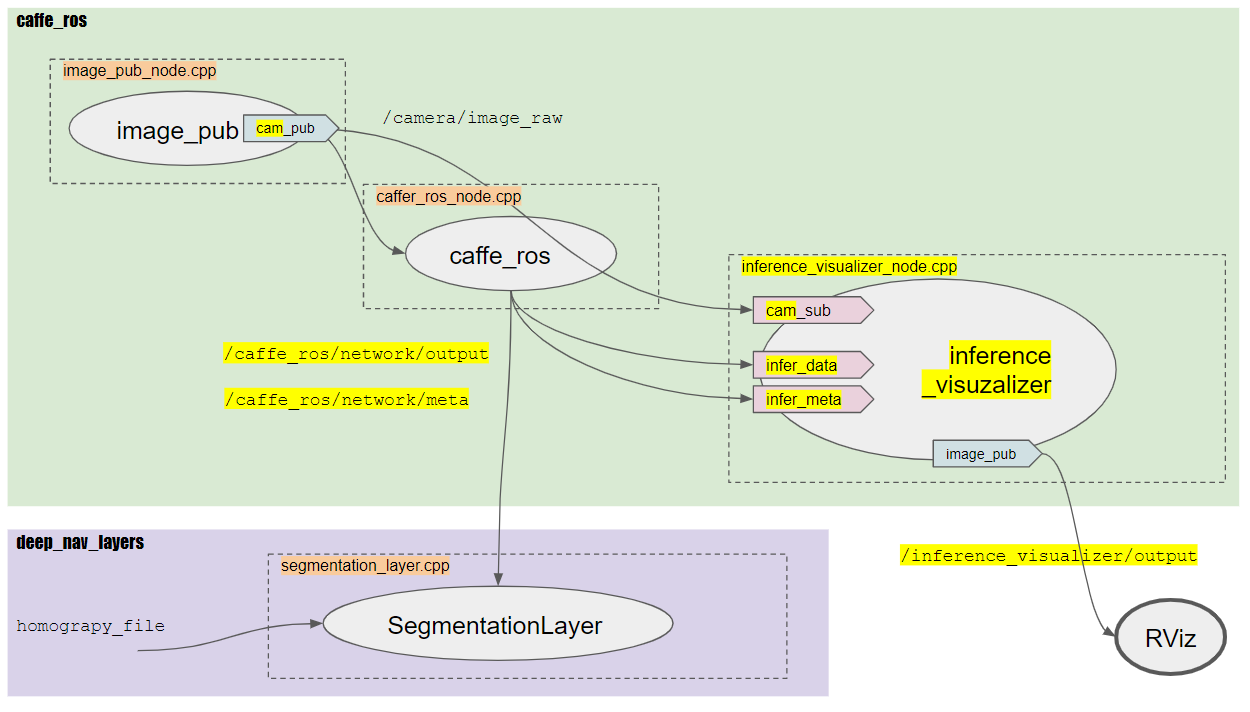
deep_nav_layers
A series of plug-ins to the ROS navigation stack to incorporate deep learning inputs.
This work provides a promising look at the potential to leverage both the power of robotics and deep learning alongside each other. This technique has several real-world applications such as detecting stairs, potholes or other hazards to robots in unstructured environments.
Required Package:
- ROS Kinetic
- NVIDIA-AI-IOT/caffe_ros
Following are the steps:
-
On Terminal #1
bash ~/jetson-UGV/tools/sim-mode.bash -
On Terminal #2
roslaunch jackal_navigation chameleon_nav.launch from_bag:=true -
On Terminal #3
rosrun rviz rviz -d ~/jetson-UGV/ros/jackal_viz/navigation.rviz -
On Terminal #1
rosbag play /ssd/lastDay.bag --clock