Multi-robot Exploration Testbed
This testbed includes:
- ROS packages for multi-robot exploration
- MORSE simulation scenarios
- Scripts for autonomous deployment of the infrastructure and experiments (computer cluster required)
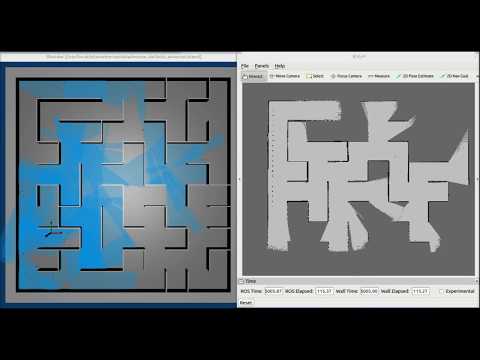
To have a general idea, please refer to the videos below, respectively showing simulated and real robot exploration:

Citation
If you are considering using these resources, please reference the following:
@article{yz17robotics,
author = {Zhi Yan and Luc Fabresse and Jannik Laval and Noury Bouraqadi},
title = {Building a ROS-based Testbed for Realistic Multi-robot Simulation: Taking the Exploration as an Example},
year = {2017},
journal = {Robotics},
volume = {6},
number = {3},
pages = {1--21}
}
Overview

The testbed is composed of four parts: a simulator, a monitor, a set of robot controllers, and the ROS middleware used to connect all of them. In particular, we use the MORSE 3D realistic simulator and wrap it up into a ROS node. The monitor is also performed as a ROS node, which allows us to supervise the experimental processes. Specifically, it can stop the experiment when the stop condition is triggered, collect measurement data and compute the metrics afterwards.
Prerequisites
- ROS Groovy or +
- MORSE 1.2 or +