NGL the NCCA Graphics Library
NGL 8 master branch
For the current build status see our CI logs here


Pre-requisites
NGL depends upon the following libraries
- GLM this is a header only library and can be copied to /usr/local/include This is a compatibility layer and can be removed by commenting out the USEGLM define in the Qt projects.
- glfw3 is used to create an OpenGL context for the unit tests, if you don't want to install this just don't build the unit tests.
- gtest for Unit testing if you are building the tests.
- RapidJSON for the Shader Library code.
- RapidXML for the Point bake classes.
- cmake for building of NGL and all demos.
To install all the dependencies I use vcpkg depending upon your platform you can read what to install in the detailed instructions below.
Additionally OpenImageIO can be used for image reading and writing. Rather than the build in Stub image loaders. This adds quite a bit more to the build time using vcpkg so only use if you need to support EXR, Tiff and other image formats not supported by the built in one.
Building
It needs to be built using QtCreator or CMake for Windows build instructions read Windows.md. A brief guide for setting up with Ubuntu can be found here UBUNTU.md and Mac OSX
Note this is now being built using C++ 17 and will use many C++ 17 features so make sure you have a modern compiler such as clang++ or g++ >4.8
For more info check out the website here
https://nccastaff.bmth.ac.uk/jmacey/GraphicsLib/ and for the demos
https://nccastaff.bournemouth.ac.uk/jmacey/GraphicsLib/Demos/index.html
Theres are also other demos on github which are generally work in progress.
Demos
BlankNGL
This is an empty boilerplate framework for NGL projects, it creates an empty window and draws nothing
SimpleNGL
This is the most basic version of an NGL demo, it creates a simple window in Qt and allows the manipulation of the teapot using the mouse.
SDLNGL
This is the simplest SDL / NGL demo using a basic SDL2.0 window and core profile OpenGL context
Note that this .pro file contains the calls to add the output of sdl2-config to the build using
There is a webgl demo of the sphere program here
VAOPrimitives
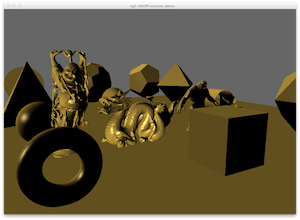
A simple scene using all of the built in VAO primitives, this has approx 350,000 Verts so is a good performance test of NGL
Camera
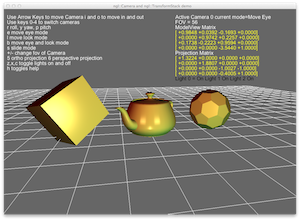
This demonstrates how to create a simple Camera class as well as showing how the camera is actually made up of a simple series of matrices. This demo also demonstrates the ngl::TextClass
Matrix Stack

This demo implements a matrix stack similar to the immediate mode OpenGL push / pop matrix functionality. It can be extended to replicate basic immediate mode OpenGL pipeline functions with modern OpenGL rendering.
using ngl::lookAt and ngl::perspective
These two demos demonstrate using the lookAt and perspective utility classes from Util.h see individual README.md for more details
Interactive demos are here and [here] (https://nccastaff.bournemouth.ac.uk/jmacey/WebGL/LookAt2/)
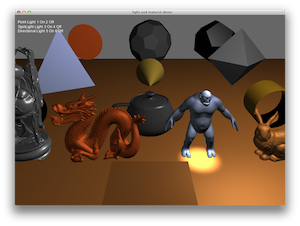
Lights
Simple demo showing how to use the ngl::Light class for point lighting WebGL version
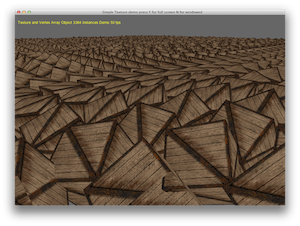
VertexArrayObject
A series of demos to show how to create a VertexArrayObject from different types of data. There are examples of how to create a simple boid shape as I was getting fed up of flocking teapots!
ShadingModels
A series of examples to demonstrate different shaders and techniques in glsl. Eventually I'm going to replace all of this with a simpler demo as most of the code in these examples is very similar.
Demo showing how to use ngl::VertexArrayObject
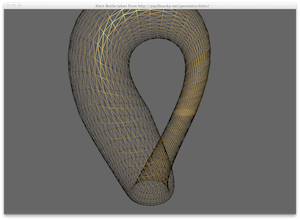
This program demonstrates the production of a Klein bottle based on the code from this excellent website It uses the ngl::VertexArrayObject class
TextureDemos
A collection of demos showing how to use textures in ngl including examples of loading from a QImage.
Texture Compression

A series of demos to show how to create and then use DXT compressed textures.
Compressor Is a simple command line tool to create basic DxT1,3,5 textures to be used with glCompressedTexImage2D formats. DXTViewer is a simple tool to load in the compressed files and view them. You can specify the name of the file on the command line or use the file open dialog presented at startup. Use o to reload a file.
ImageHeightMap
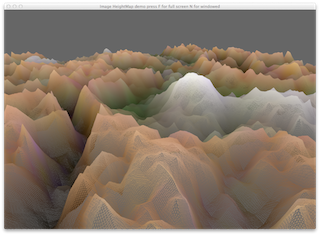
This demo shows how to read in an image and create terrain from it by using one of the channels as the height of the vertex in the y.
ObjDemo
Loads a mesh from an obj file using ngl::Obj and displays it.
GameKeyControl
A demonstration on how to do game style multi key controls within Qt
AdvancedGameKeyControl
A demonstration on how to do game style multi key controls within Qt and record them
SDLJoyPad
This demo requires SDL 2.0 and a wireless xbox controller. Under the mac you can install this driver. Under linux you may have to install the xpad kernel driver
So far it has not been tested under windows and the button mappings may be different.
Interpolation
This demo demonstrates the different interpolation templates in ngl, see this blog post
QuatSlerp
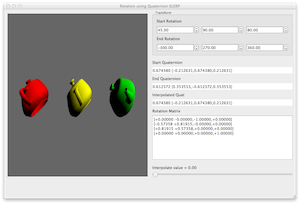
This demo shows how the Quaternion spherical interpolation works. Interactive WebGL demo
CurveDemos
Two demos showing how to use the ngl::BezierCurve class, including an example of exporting from maya using a simple script
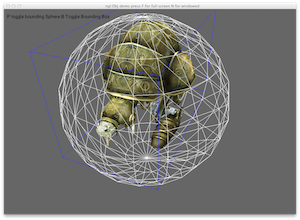
Collision Demos
A series of programs showing Ray-Sphere, Ray-Triangle, Sphere-Sphere, Sphere-Plane collision detection algorithms
An interactive WebGL demo
OctreeAbstract
An Abstract Octree template to use in your own projects, this code is originally writen by my collegue Dr Xiaosong Yangfor his advanced collision detection lectures and templated and ported to ngl by me. Interactive WebGL demo here
ParticleFactory
This demo demonstrates the use of the factory pattern and runtime polymorphism
ColourSelection
Picking of objects using Colour values based on this post
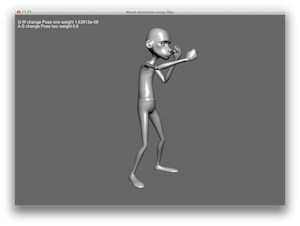
Point Bake Demos
The NCCA PointBake format is a simple xml format for storing per vertex animation data, presented in these demos are maya scripts to export in the format and some demos to show how to load and visualise this data.
Morph Objects
Morphing meshes using shaders. based on the paper here
Morph Objects (Texture Buffer Objects)
Morphing meshes using shaders and texture buffer objects. based on the paper here
Facial Animation
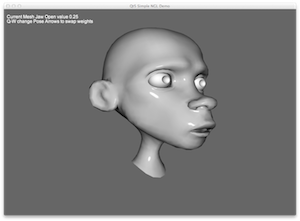
Simple Facial animation using blen shape meshes and texture buffer objects
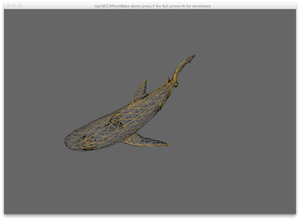
Using libassimp to load meshes
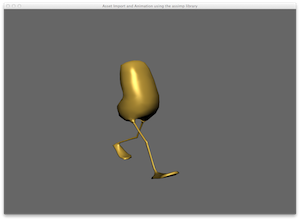
How to load and animate meshes using assimp
Embeded Python
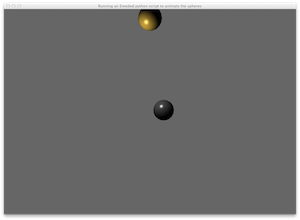
This demo show how to embed the pyhton C interpretor into your own code and run python scripts
QtNGL
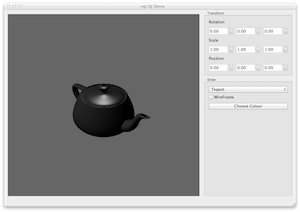
How to use the Qt GUI with NGL
Mass Spring System using RK 4 integration
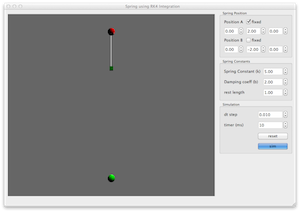
This demonstrates a simple spring using RK4 integration as shown here
Affine Transforms
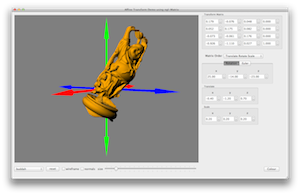
A demonstration of affine transforms using matrices (mainly used for teaching maths)
Geometry Shaders
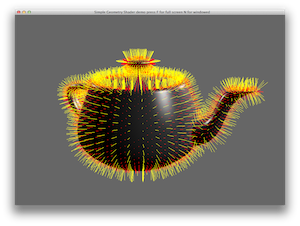
Simple Geometry shader demo
Tesselation shader

This demo is the one written for this blog post and implements this code
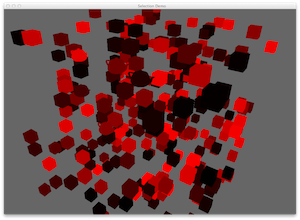
Animated Textures
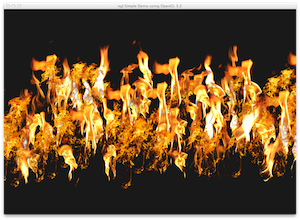
This demo uses several sprite sheets of fire to generate an animated fire using billboards. The billboards are generated on the GPU using a geometry shader and the data for the frames / animation is passes using attributes.
Instancing
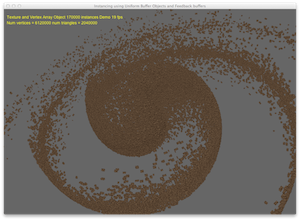
A number of demos showing how instancing in OpenGL works
Normal Mapping

This demo uses the ngl::Obj and ngl::VertexArrayObject classes to read in a mesh then construct an extended VAO passing in Tangents and Bi-Tangents (BiNormals) to glsl as attributes. This is then used to do normal mapping along the lines of this
Using Framebuffer Objects
A number of demos showing how to use Frame buffer objects, including real time shadows and render to FBO demos
RVO2NGL
A number of demos showing how to use the RVO2 Reciprocal Collision Avoidance for Real-Time Multi-Agent Simulation library with NGL.
Bullet Physics and NGL
Using the Bullet Physics with NGL, the demo has basic wrappers for the Physics world and rigid bodies, it also uses the ngl::Obj to load low-res collision meshes and uses higher detail ones for the drawing.
For more details read the user guide of Bullet.
Bullet Physics and NGL

Using the Bullet Physics with NGL, the demo has basic wrappers for the Physics world and rigid bodies It then procedurally generates a tower which the user can demolish.
An interactive WebGL demo is here For more details read the user guide of Bullet.
Sponza Demo
A basic framework to load a Wavefront OBJ file with groups and an MTL file with textures and draw the scene as efficiently as possible. The source contains the models and textures from here and is quite large
For a detailed look at how this work see the following blog posts
Box2D Demo
A simple demo to show Box2D being used with ngl
Export from Maya to Box2D
A simple example of an exported then using it in box 2D see the python files for more details