zhoujianling / Pointcloudutilities
Programming Languages
Projects that are alternatives of or similar to Pointcloudutilities
PointCloudUtilities




Description
Utilities for point cloud processing.
Features
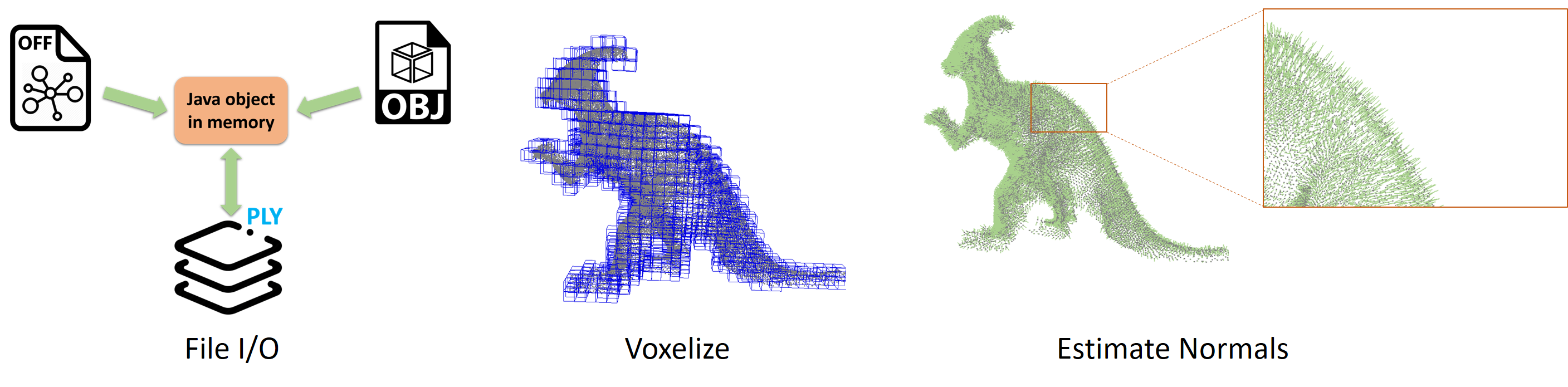
- Read and write a PLY file.
- Read an OFF file.
- Read an OBJ file.
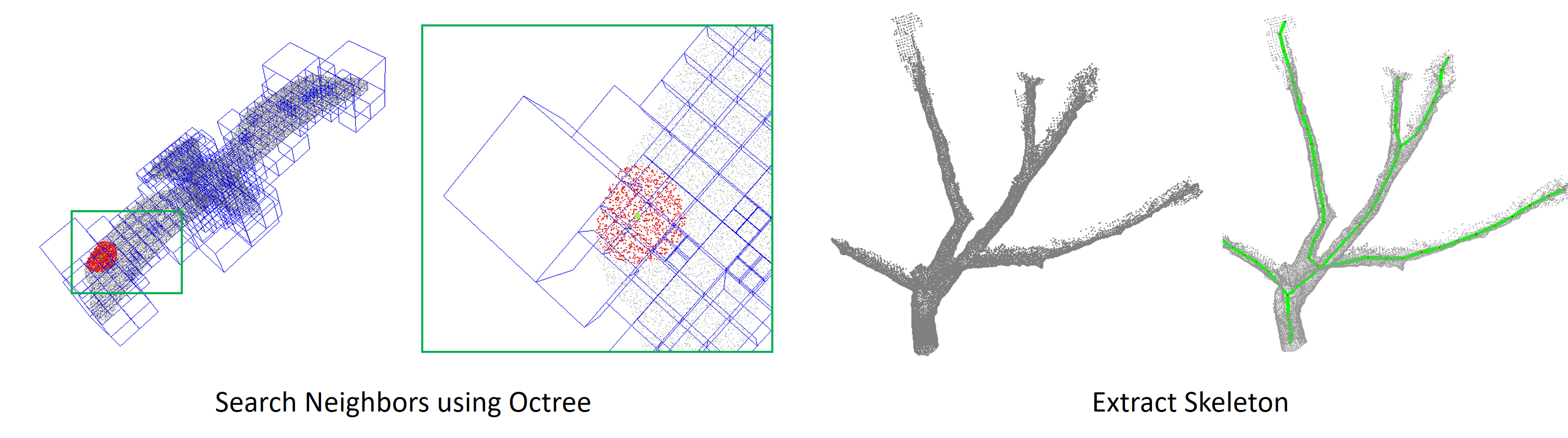
- Search nearest neighbors using Octree.
- Estimate normals of point cloud surface.
- Other algorithms for point cloud processing...
Build
Make sure maven has been installed and directory of maven has been added into PATH. Run following command:
mvn package -X
Download
- Download the release via Maven Central.
- Obtain SNAPSHOT release from this page
How to Use It
PlyReader
Firstly, on *NIX system, use following command to see the header of your ply file:
head foo.ply
you will see a structure like this:
ply
format binary_little_endian 1.0
element vertex 27788
property float x
property float y
property float z
property uchar red
property uchar green
property uchar blue
property uchar alpha
property float quality
element face 52113
property list uchar int vertex_indices
end_header
Secondly, you need to declare an entity class for your point cloud. You must provide getters for vertex data or face data and then annotate them with @ReadFromPly. Make sure the element and properties in the annotation are corresponding to your ply header.
The following code snippet shows how to define a point cloud or mesh:
class YourPointCloud {
private List<float[]> points = new ArrayList<>();
@ReadFromPly(
properties = {"x", "y", "z"},
element = "vertex"
)
public List<float[]> getPoints() {
return points;
}
}
Thirdly, instantiate a PlyReader, call read() to obtain your point cloud object.
File file = new File("path of your ply file"); //ply file
PlyReader plyReader = new PlyReader();
YourPointCloud pc = plyReader.read(file, YourPointCloud.class);
PlyWriter
There are two choices for writing a PLY file.
Use annotation
Firstly, declare an entity class for your point cloud or mesh and provide getters of vertex data or face data. You can read multiple scalar properties in one element using annotation @WriteScalarToPly or one list property in one element using annotation @WriteListToPly at once.
private class PlyEntity {
List<Point3d> vertices = new ArrayList<>();
List<int[]> vertexIndices = new ArrayList<>();
@WriteScalarToPly(element = "vertex", properties = {"x", "y", "z"}, type = PcuDataType.DOUBLE)
public List<double[]> vertices() {
List<double[]> result = new ArrayList<>();
for (Point3d p : vertices) {
result.add(new double[]{p.x, p.y, p.z});
}
return result;
}
@WriteListToPly(element = "face", property = "vertex_index")
public List<int[]> faces() {
return vertexIndices;
}
}
Secondly, instantiate a PlyWriter and call write() to write the data into a file:
PlyEntity entity = new PlyEntity();
// put your data into entity
PlyWriter writer = new PlyWriter();
writer.write(entity, new File("ply path"));
Use prepare()
Firstly, prepare your vertices data and face data.
List<float[]> vertexData = new Vector<>();
vertexData.add(new float[] {0.1f, -3.0f, 0.7f});
vertexData.add(new float[] {0.3f, +3.0f, 0.9f});
vertexData.add(new float[] {2.1f, -3.0f, 1.1f});
vertexData.add(new float[] {0.5f, -3.0f, 1.0f});
vertexData.add(new float[] {2.1f, -3.0f, 1.1f});
List<int[]> faceData = new Vector<>();
faceData.add(new int[] {0, 1, 2});
faceData.add(new int[] {1, 0, 4});
Secondly, use one line of code to write the geometry data to a ply file.
int result = new PlyWriter()
.prepare()
.format(PlyFormat.ASCII)
.comment("this is test")
.defineElement("vertex")
.defineScalarProperties(new String[] {"x", "y", "z"}, PcuDataType.FLOAT, vertexData)
.defineElement("face")
.defineListProperty("vertex_indices", PcuDataType.UCHAR, PcuDataType.INT, faceData)
.writeTo(new File("yourModel.ply"))
.okay();
OffReader
You can use OffReader to get point cloud data from OFF file.
Define the entity class as you did in PlyReader. Annotate the getters of vertex data or face data with @ReadFromOff, see following code snippet:
public class PolygonMesh3f {
private List<float[]> points;
private List<int[]> faces;
public PolygonMesh3f() {
points = new ArrayList<>();
faces = new ArrayList<>();
}
@ReadFromOff(dataType = ReadFromOff.VERTICES)
public List<float[]> getPoints() {
return points;
}
@ReadFromOff(dataType = ReadFromOff.FACES)
public List<int[]> getFaces() {
return faces;
}
}
Instantiate the OffReader and call read() to obtain the point cloud or mesh object.
File file = new File("path...");
OffReader reader = new OffReader();
PolygonMesh3f mesh = reader.read(file, PolygonMesh3f.class);
Octree
Instantiate the Octree object, after calling buildIndex(), the approximate nearest neighbors of certain point can be quickly found.
List<Point3d> points = new ArrayList();
// ****
int n = 5; // number of neighbors
int i = 6; // if you want to find the nearest neighbors of the ith point.
Octree octree = new Octree();
octree.buildIndex(points);
int[] neighborIndices = octree.searchNearestNeighbors(n, i);
Another function searchNeighborsInSphere() is useful in finding all points within a given distance.
double radius = 0.5d;
List<Integer> neighborIndices2 = octree.searchNeighborsInSphere(i, radius);
Point Cloud Algorithms
PCU implements some commonly used point cloud algorithms. WLOP method can re-sample point cloud:
List<Point3d> pointCloud = new ArrayList();
// ...
int iterationNum = 10;
WeightedLocallyOptimalProjector wlop = new WeightedLocallyOptimalProjector(pointCloud);
// the positions of points will be updated in place.
wlop.project(points, iterationNum);
Level set method can be used to extract skeleton of tree-like object:
List<Point3d> vertices = new ArrayList();
LevelSetSkeleton skeleton = new LevelSetSkeleton();
Skeleton skel = skeleton.skeletonize(vertices);
Graph API
PCU provide some commonly used graph-based methods, which can be found under package cn.jimmiez.pcu.graph.
How to Visualize Point Cloud
This library only provide api to operate 3d point cloud and cannot be used for 3d presentation.
If you need to visualize point cloud using Java, you can refer to PointCloudUtilSample which uses Java3d;
TODO List
- Delaunay triangulation
- vtk reader
- more unit tests