S T E W A R T P L A T F O R M O N E S P 3 2
ABSTRACT
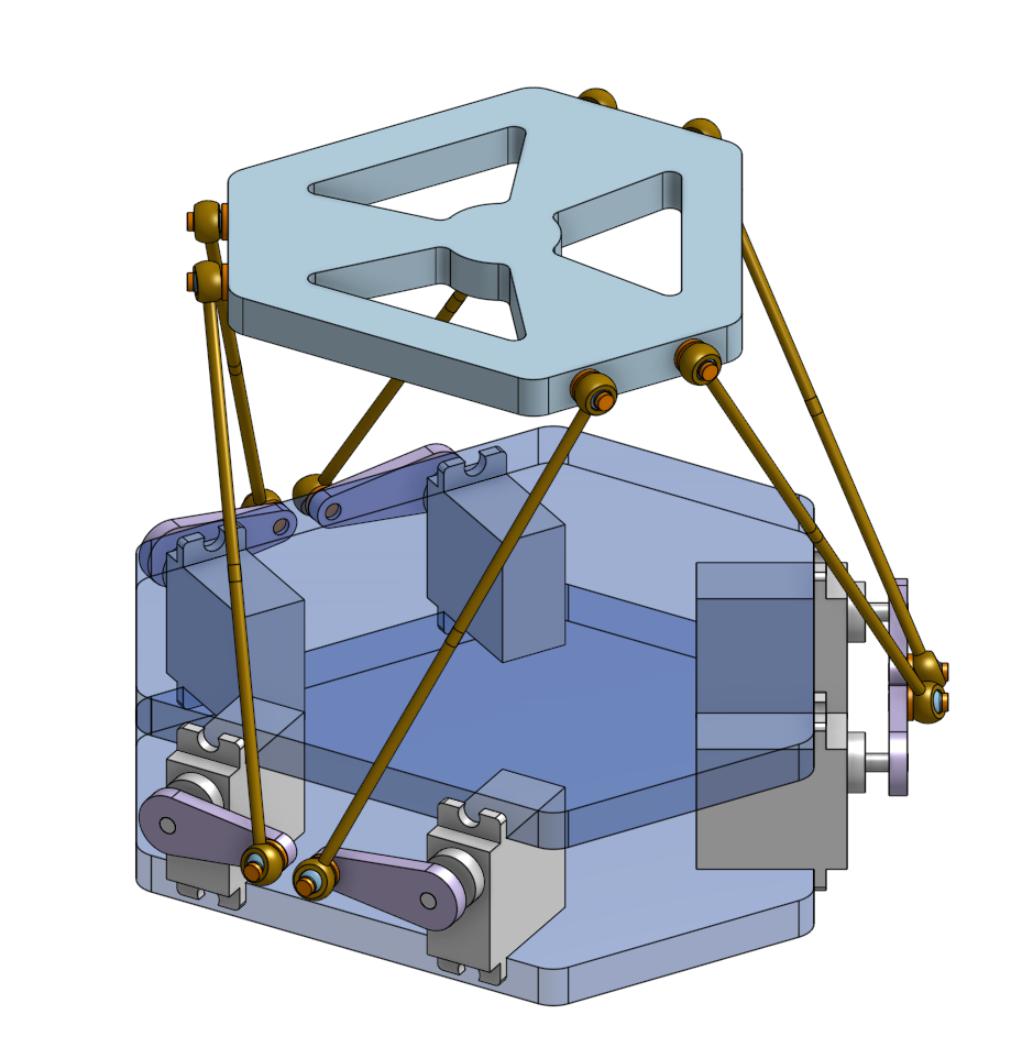
This is an implementation on the ESP32 of a 6-degrees of freedom hexapod — also called Stewart Platform, Gough-Stewart Platform or Parallel manipulator. The actuators are PWM rotary servo motors and the program is written in Arduino C for PlatformIO Core 4.0. This project is done in the frame of the P19 project at the Microclub.
Currently the platform can be operated:
- with a Nunchuck
- with Arduino C code (see
Hexapod_Demo.cpp) - with G-Code through serial (see
python/gcode2serial.py)
The kinematics calculation is done in Hexapod_Kinematics.cpp and can be also be compiled in a desktop C++ program to cross check calculations (i.e. without actuating the servos). I managed to compile it with g++ on macOS Mojave and macOS Monterey. See hexapod_desktop_app/hexapod_desktop_app.cpp.
HOME PAGE OF THE PROJECT
The home page is a work in progress, but the video shows what the platform can do. The original implementation used an analog joystick, but the current version uses a Wii Nunchuck.
https://ouilogique.com/plateforme-de-stewart-esp32/
GEOMETRY SETTINGS
Geometry settings are defined in Hexapod_Config_1.h. The meaning of the parameters is also explained in doc/hexapod-parameters.pdf.
REQUIREMENTS
Create a file called src/WifiSettings.h containing:
#pragma once
const char *ssid = ""; // SSID of your WiFi router.
const char *password = ""; // Password of your WiFi router.
const char *ap_ssid = "STEW32-"; // SSID of the ESP32 WiFi network in soft-AP mode (15 char max).
const char *ap_password = ""; // Password of the ESP32 WiFi network in soft-AP mode.
// Must be 8 char min or empty for no password.COMPONANTS & WIRING
ESP32
WeMos ESP32 WROOM https://www.banggood.com/fr/WeMos-ESP32-WiFi-Bluetooth-Development-Board-Ultra-Low-Power-Consumption-Dual-Core-ESP-32-ESP-32S-p-1175488.html
PCA9685
https://www.mouser.ch/ProductDetail/adafruit/3416/?qs=F5EMLAvA7ICYzX4Av%252bhRHw==
External power supply
I currently use a 5 V / 10 A power supply, but 5 V is not enough. I need to upgrade to 7 V. https://aliexpress.com/af/32810906485.html
Rods
M3x100mm (140mm total) https://aliexpress.com/af/32775630549.html
Servo horn arm
Tritanium color https://aliexpress.com/af/32843432977.html
Servos
- I currently use clones of the Tower Pro MG996R servos, but they are bad and I don’t recommend them. https://fr.aliexpress.com/item//32636102294.html
- I formerly used clones of the Tower Pro MG90s Servos, but they were also bad and too small for this application. https://www.banggood.com/6X-Towerpro-MG90S-Metal-Gear-RC-Micro-Servo-p-1072260.html
- In the future, I will probalbly use Parallax 900-00005 servos. It seems that these are the one used by fullmotiondynamics in their videos. https://www.parallax.com/product/900-00005
Pins are defined in
Hexapod_Config_1.h.
| servo | ESP32 pin |
|---|---|
| 0 | 13 |
| 1 | 15 |
| 2 | 27 |
| 3 | 14 |
| 4 | 33 |
| 5 | 25 |
Nunchuck
- Nunchuck https://fr.aliexpress.com/item//32880983134.html
- Cable extension https://fr.aliexpress.com/item//32841281892.html
The Nunchuck library uses
Wire.hand standard I²C connections internaly.Pins are seen from left to right and top to bottom looking at the Nunchuck connector.
Cut the cable extension to connect to the ESP32.
| color | signal | ESP32 pin |
|---|---|---|
| white | SCL | IO22 |
| NC | ||
| red | GND | GND |
| green | VCC | VCC |
| black | ATT | IO4 (Not required, gives VCC if Nunchuck is connected) |
| yellow | SDA | IO21 |
EXTERNAL LIBRARIES
The external libraries are installed automatically during the first build because they are declared under lib_deps in platformio.ini.
I²C Addresses
| Default address | New address | Device |
|---|---|---|
| 0x40 | 0x41 | PCA9685 |
| 0x70 | = | PCA9685 (broadcast) |
| 0x40 | = | Nunchuck (accel) |
| 0x52 | = | Nunchuck (joystick) |
| 0x68 | = | GY-91 (MPU9250) |
| 0x76 | = | GY-91 (BMP280) |
CREDITS
Primary source of inspiration
- San-José State University / Full Motion Dynamics:
Kinematics
- Hexapod kinematics of this project was originaly based on 6dof-stewduino, by Philippe Desrosiers, althought I reworked it in depth:
- He derived his implementation from the work of Daniel Waters:
- Kinematics calculation is also explained in this document by an unknown author from the Wokingham U3A Math Group:
- The project memememememememe was also an excellent source of inspiration. They share the code for RPi and a simulator in the Processing langage:
Serial buffer for G-Code
- Derived from MarginallyClever:
FURTHER READING
- PID Control System Analysis and Design, By YUN LI, KIAM HEONG ANG, and GREGORY C.Y. CHONG
- See Table 1, p.33 http://eprints.gla.ac.uk/3815/1/IEEE_CS_PID_01580152.pdf
- Understanding PID Control, Part 1: What is PID Control?
- Modern Robotics, Chapter 7: Kinematics of Closed Chains