ethz-asl / Aerial_mapper
Licence: bsd-3-clause
Real-time Dense Point Cloud, Digital Surface Map (DSM) and (Ortho-)Mosaic Generation for UAVs
Stars: ✭ 360
Projects that are alternatives of or similar to Aerial mapper
Uav Mapper
UAV-Mapper is a lightweight UAV Image Processing System, Visual SFM reconstruction or Aerial Triangulation, Fast Ortho-Mosaic, Plannar Mosaic, Fast Digital Surface Map (DSM) and 3d reconstruction for UAVs.
Stars: ✭ 106 (-70.56%)
Mutual labels: uav, mapping, mosaic
ufomap
UFOMap: An Efficient Probabilistic 3D Mapping Framework That Embraces the Unknown
Stars: ✭ 117 (-67.5%)
Mutual labels: uav, mapping
DroneDB
Free and open source software for aerial data storage.
Stars: ✭ 74 (-79.44%)
Mutual labels: uav, mapping
StrayVisualizer
Visualize Data From Stray Scanner https://keke.dev/blog/2021/03/10/Stray-Scanner.html
Stars: ✭ 30 (-91.67%)
Mutual labels: mapping
orika-spring-boot-starter
Spring Boot Starter for Orika.
Stars: ✭ 116 (-67.78%)
Mutual labels: mapping
Softrf
✈️ Multifunctional, compatible DIY general aviation proximity awareness system
Stars: ✭ 321 (-10.83%)
Mutual labels: uav
Agilemapper
A zero-configuration, highly-configurable, unopinionated object mapper with viewable execution plans. Flattens, unflattens, deep clones, merges, updates and projects queries. Targets .NET 3.5+ and .NET Standard 1.0+
Stars: ✭ 345 (-4.17%)
Mutual labels: mapping
localization mapping
ROS nodes for outdoor SLAM on a ground robot
Stars: ✭ 39 (-89.17%)
Mutual labels: mapping
Quadrotor
Quadrotor control, path planning and trajectory optimization
Stars: ✭ 331 (-8.06%)
Mutual labels: uav
Leaflet.markercluster
Marker Clustering plugin for Leaflet
Stars: ✭ 3,305 (+818.06%)
Mutual labels: mapping
Awesome Gee
A curated list of Google Earth Engine resources
Stars: ✭ 292 (-18.89%)
Mutual labels: mapping
Poiji
🍬 A tiny library converting excel rows to a list of Java objects based on Apache POI
Stars: ✭ 255 (-29.17%)
Mutual labels: mapping
Ardrone autonomy
ROS driver for Parrot AR-Drone 1.0 and 2.0 quadrocopters
Stars: ✭ 325 (-9.72%)
Mutual labels: uav
logitech-m720-config
A configuration script for Logitech M720 that remaps mouse buttons (Linux)
Stars: ✭ 59 (-83.61%)
Mutual labels: mapping
Autonomous UAVs Swarm Mission
No description or website provided.
Stars: ✭ 69 (-80.83%)
Mutual labels: uav
Sparse To Dense
ICRA 2018 "Sparse-to-Dense: Depth Prediction from Sparse Depth Samples and a Single Image" (Torch Implementation)
Stars: ✭ 329 (-8.61%)
Mutual labels: mapping
Mapnik
Mapnik is an open source toolkit for developing mapping applications
Stars: ✭ 3,067 (+751.94%)
Mutual labels: mapping
Librepilot
This is the GitHub mirror for the LibrePilot source code. The main development is taking place at https://bitbucket.org/librepilot
Stars: ✭ 260 (-27.78%)
Mutual labels: uav
Deep Learning Localization Mapping
A collection of deep learning based localization models
Stars: ✭ 300 (-16.67%)
Mutual labels: mapping
aerial-mapper
Overview
- Load camera poses from different formats (such as PIX4D, COLMAP)
- Generates a dense point cloud from raw images, camera poses and camera intrinsics
- Generates Digital Surface Models (DSMs) from raw point clouds and exports e.g. to GeoTiff format
- Different methods to generate (ortho-)mosaics from raw images, camera poses and camera intrinsics
Package Overview
- aerial_mapper: Meta package
- aerial_mapper_demos: Sample executables.
- aerial_mapper_dense_pcl: Dense point cloud generation using planar rectification.
- aerial_mapper_dsm: Digitial Surface Map/Model generation.
- aerial_mapper_google_maps_api: Wrapper package for Google Maps API.
- aerial_mapper_grid_map: Wrapper package for grid_map.
- aerial_mapper_io: Input/Output handler that reads/writes poses, intrinsics, point clouds, GeoTiffs etc.
- aerial_mapper_ortho: Different methods for (ortho-)mosaic generation.
- aerial_mapper_thirdparty: Package containing thirdparty code.
- aerial_mapper_utils: Package for common utility functions.
Getting started
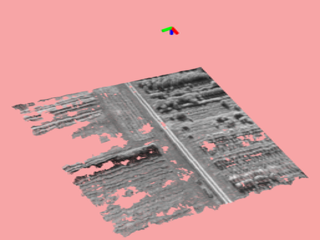
Output samples
| Dense point cloud (from virtual stereo pair, 2 images) |
Digital Surface Map (DSM, exported as GeoTiff) |
(Ortho-)Mosaic (from homography, 249 images) |
|---|---|---|
 |
 |
 |
| Raw images | Dense point cloud | Digital Surface Map |
|---|---|---|
 |
 |
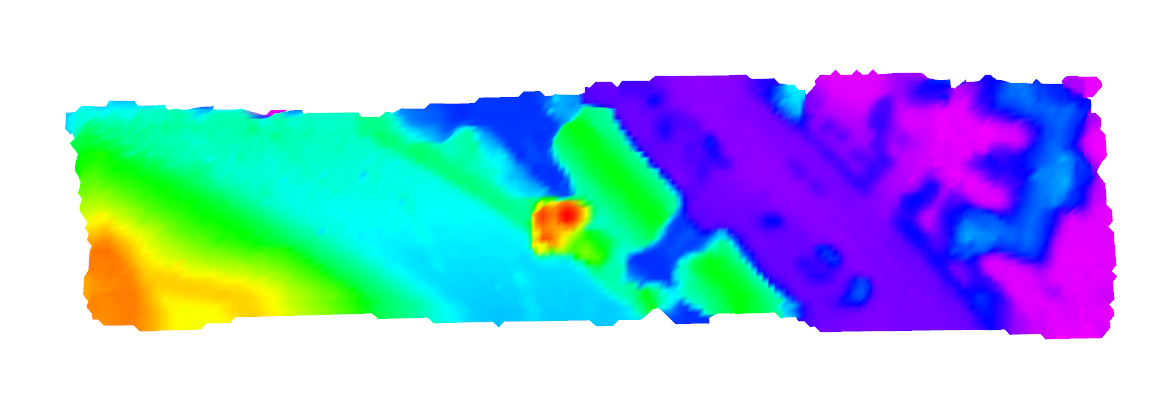 |
| Observation Angle (red: nadir) |
Grid-based Orthomosaic (Cell resolution: 0.5m) |
Textured DSM |
 |
 |
 |
Publications
If you use this work in an academic context, please cite the following publication:
T. Hinzmann, J. L. Schönberger, M. Pollefeys, and R. Siegwart, "Mapping on the Fly: Real-time 3D Dense Reconstruction, Digital Surface Map and Incremental Orthomosaic Generation for Unmanned Aerial Vehicles" [PDF]
@INPROCEEDINGS{fsr_hinzmann_2017,
Author = {T. Hinzmann, J. L. Schönberger, M. Pollefeys, and R. Siegwart},
Title = {Mapping on the Fly: Real-time 3D Dense Reconstruction, Digital Surface Map and Incremental Orthomosaic Generation for Unmanned Aerial Vehicles},
Booktitle = {Field and Service Robotics - Results of the 11th International Conference},
Year = {2017}
}
Acknowledgment
This work was partially funded by the European FP7 project SHERPA (FP7-600958) and the Federal office armasuisse Science and Technology under project number 050-45. Furthermore, the authors wish to thank Lucas P. Teixeira from the Vision for Robotics Lab at ETH Zurich for sharing scripts that bridge the gap between Blender and Gazebo.
Note that the project description data, including the texts, logos, images, and/or trademarks,
for each open source project belongs to its rightful owner.
If you wish to add or remove any projects, please contact us at [email protected].