CopterSim
A high-fidelity simulation model developed in Simulink that compatible with different types of multicopters. The model can be used to develop control algorithms in Simulink. The simulation model includes sensor data outputs that can be used to generate code to performe hardware-in-the-loop simulations for autopilot systems like Pixhawk/PX4 or Ardupilot. The fault-injection function allows testing the safety and reliability of the control algorithms.
Contact Info.
Visit our Lab pages to contact us:
http://rfly.buaa.edu.cn/index.html
A video to present the hardware-in-the-loop simulation project based on this simulation model.

How to use the files.
- Open "Multicopter_vPC.slx" file with Matlab 2017b and later. Noteworthy, the Aerospace Blockset is required for MATLAB.
- Click the "Run" button to run the Simulink model.

- Click the "Compile" button to compile the model to C Code (Visual C++ 2015 or later is required).
- Generate Code for LabVIEW for hardware-in-the-loop simulations. Configure the Simulink setting page according to the figure below.
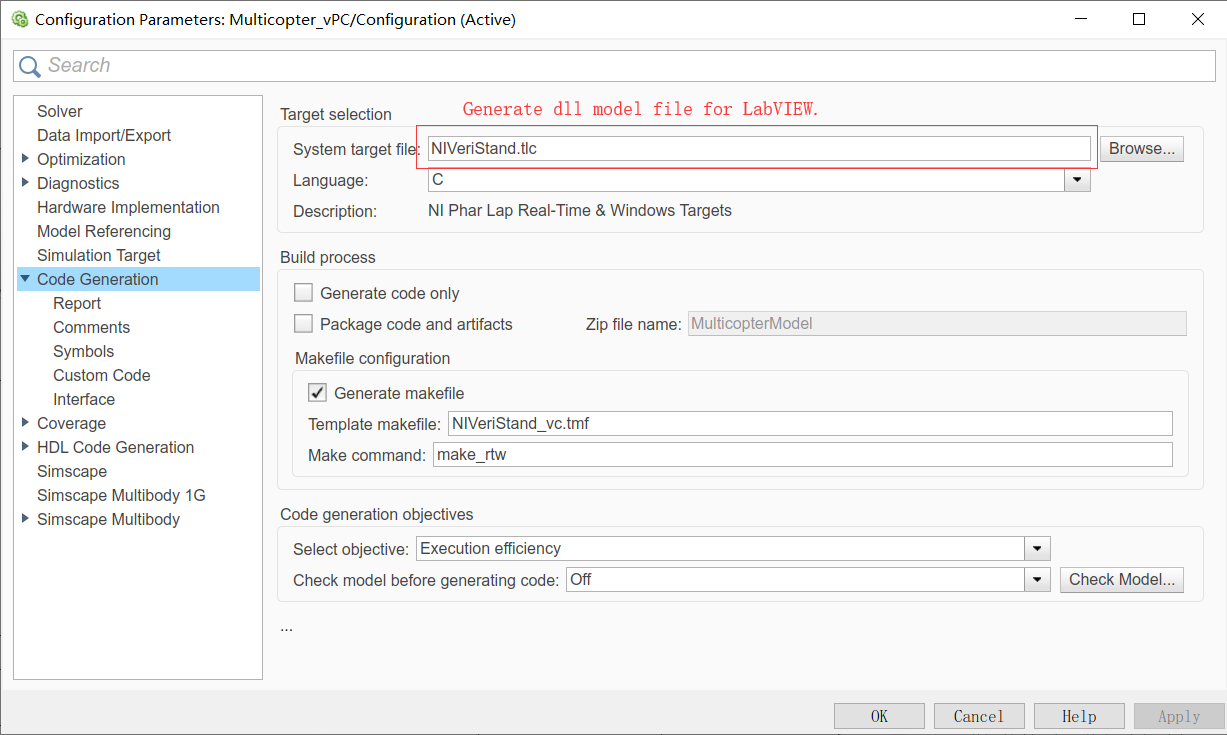
- Generate code for embedded system. Change the above "System target file" option to "ert.tlc".
File structure.
imgs: images for this Readme.md Tutorial.
Init.m: Initialization script automatically called before running the model File.
MavLinkStruct.mat: the bus Structs for the output and input signals
Multicopter_vPC.slx : the main Simulink model file.
SupportedVehicleTypes.docx : supported vehicle types.
MathModelDocEn.pdf : Mathematical derivation and simple modeling method for the simulatin model.
Input and output Ports.
inPWMs: input signal, ESC/motor control signal from the control system, eight-dimensional float vector, ranges from 0 to 1.
Terrain: input signal, the current terrain height, one-dimensional float value, positive for the down direction, unit (m)
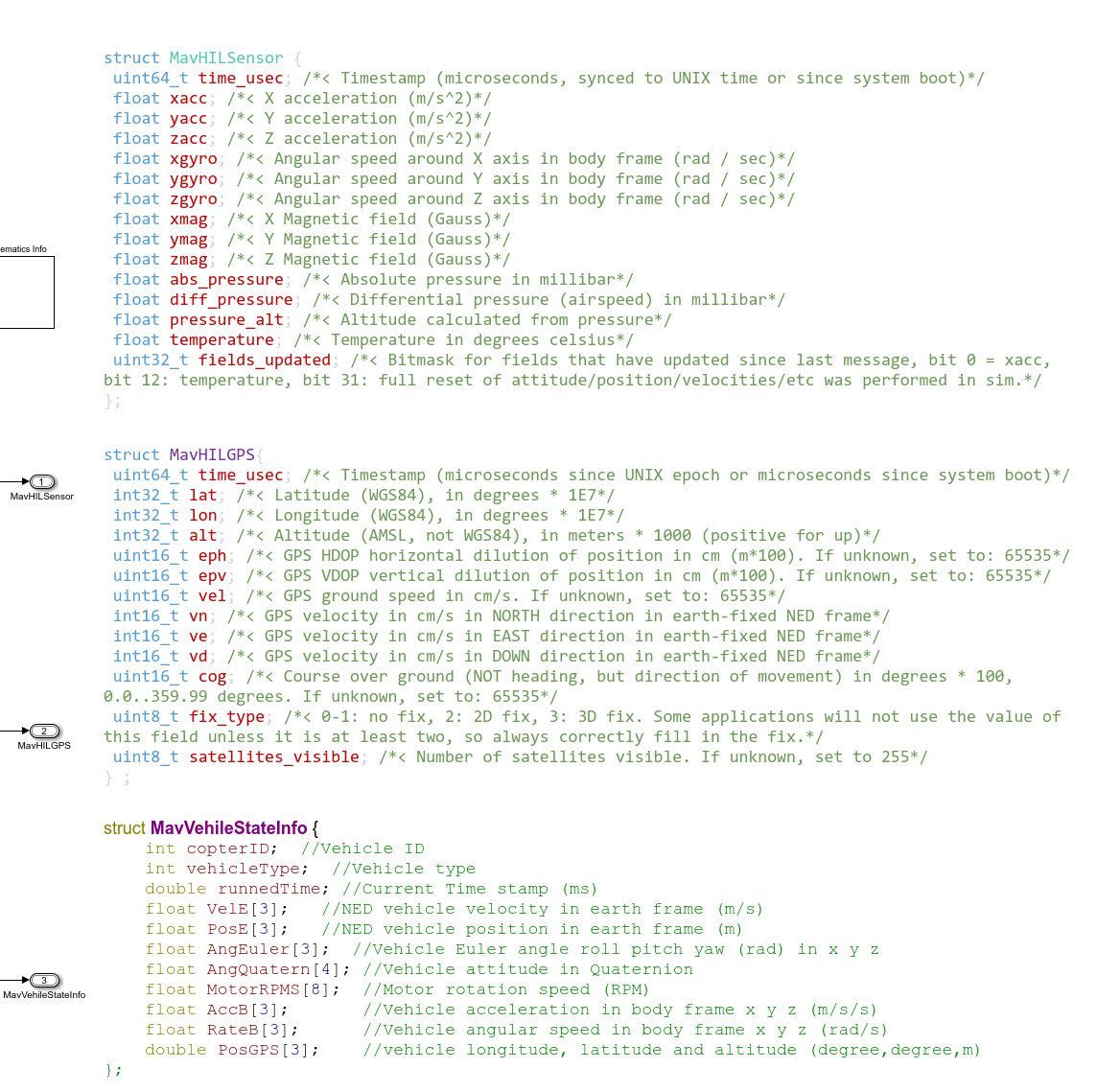
MavHILSensor: output signal, bus struct, contains sensor data required by the Autopilot system like PX4/Ardupilot
MavHILGPS: output signal, bus struct, contains GPS data required by the Autopilot system like PX4/Ardupilot
MavVehileStateInfo: output signal, bus struct, contains true state of the vehicle for the vehicle software simulation in Simulink
the detailed definition for the above output structs are presented below.
Change vehicle types.
The models cover all multicopter airframe for PX4 autopilot?http://dev.px4.io/en/airframes/airframe_reference.html
Modify the parameter "ModelParam_uavType" in Init.m file to change the vehicle types.
The supported vehicle types include:
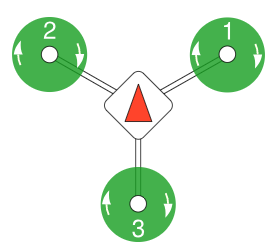
ModelParam_uavType = 1: Tricopter Y+
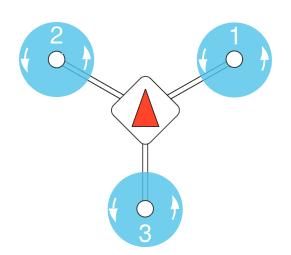
ModelParam_uavType = 2: Tricopter Y-
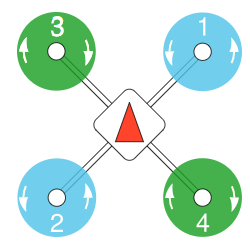
ModelParam_uavType = 3: Quadrotor X
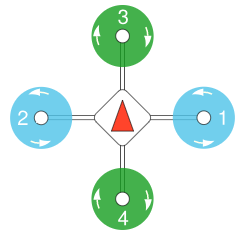
ModelParam_uavType = 4: Quadrotor +
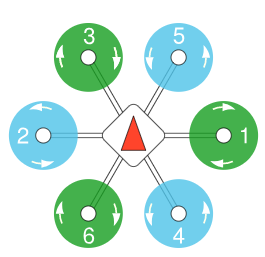
ModelParam_uavType = 5: Hexarotor x
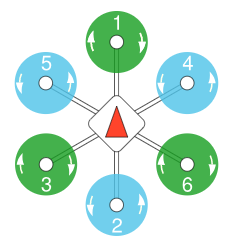
ModelParam_uavType = 6: Hexarotor +
ModelParam_uavType = 7: Hexarotor Coaxial
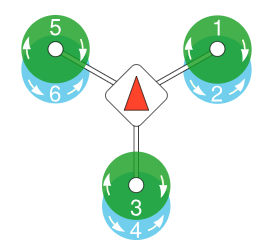
ModelParam_uavType = 8: Octorotor x
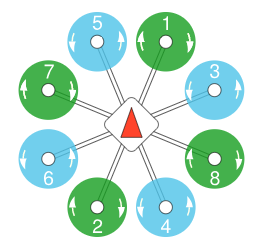
ModelParam_uavType = 9: Octorotor +
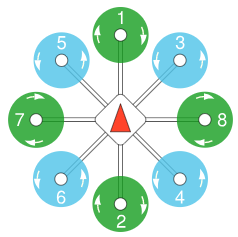
ModelParam_uavType = 10: Octorotor Coaxial
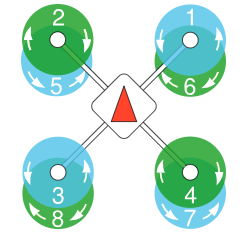
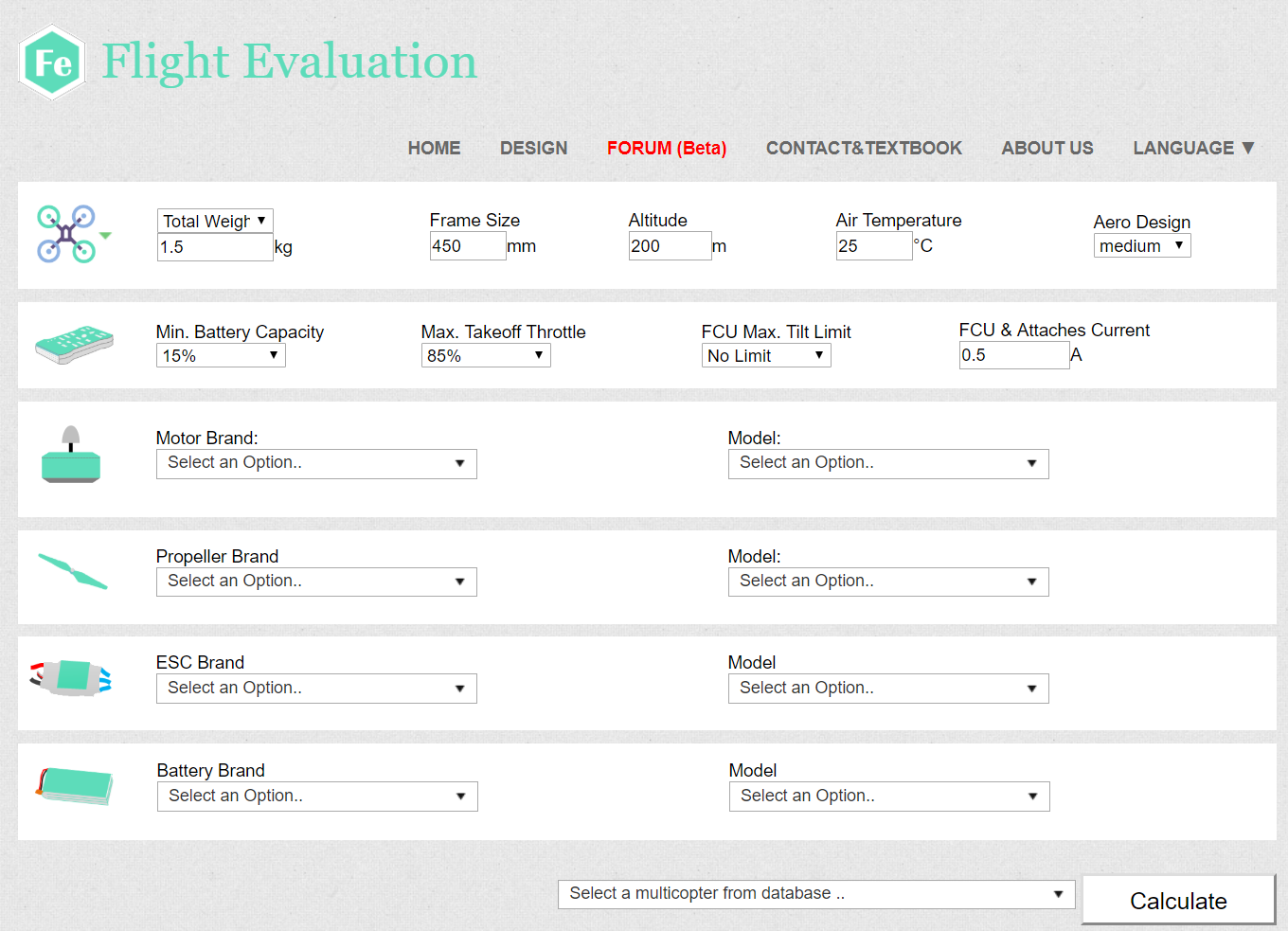
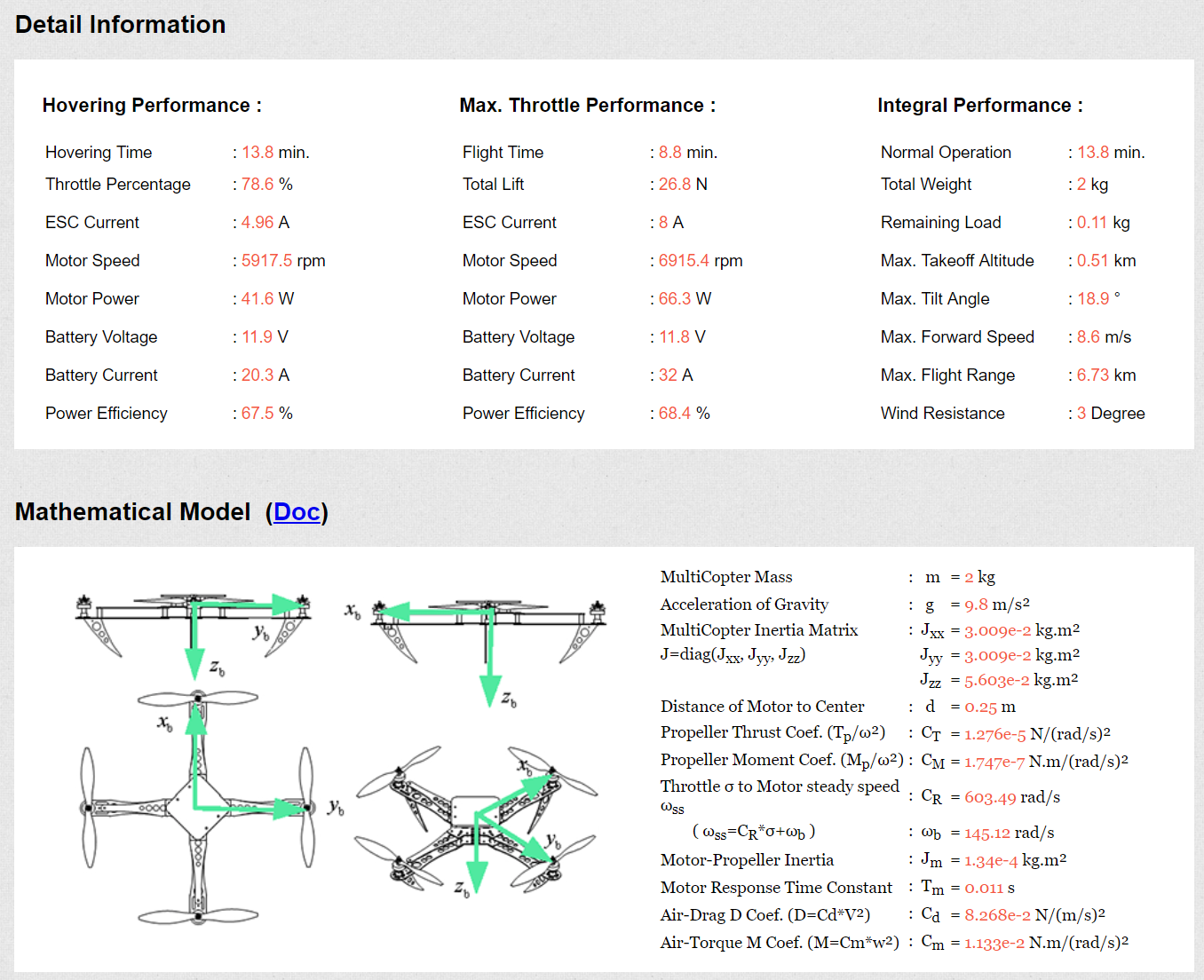
An online toolbox to quickly obtain the model parameters
Modify model parameters and inject fault during flight.
Change the corresponding parameters in Init.m file
load MavLinkStruct; % load the bus structs HILGPS MavLinkGPS MavLinkSensor MavVehileInfo
%Initial condition
%set vehicle initial state.
ModelInit_PosE = [0,0,0]; % Vehicle postion xyz in the NED earth frame (m)
ModelInit_VelB = [0,0,0]; % Vehicle speed xyz in the NED earth frame (m/s)
ModelInit_AngEuler = [0,0,0]; % Vehicle Euler angle xyz (roll,pitch,yaw) (rad)
ModelInit_RateB = [0,0,0]; % Vehicle angular speed xyz (roll,pitch,yaw) in the body frame (rad/s)
ModelInit_RPM = 0; %Initial motor speed (rad/s)
%UAV model parameter
ModelParam_uavMass = 1.4; %Mass of UAV(kg)
ModelParam_uavJxx = 0.0241; % moment of inertia in body x axis
ModelParam_uavJyy = 0.0239; % moment of inertia in body y axis
ModelParam_uavJzz = 0.0386; % moment of inertia in body z axis
%Moment of inertia matrix
ModelParam_uavJ= [ModelParam_uavJxx,0,0;...
0,ModelParam_uavJyy,0;...
0,0,ModelParam_uavJzz];
ModelParam_uavType = int8(3); %X-type quadrotor£¬refer to "SupportedVehicleTypes.docx" for specific definitions
ModelParam_uavMotNumbs = int8(4); %Number of motors
ModelParam_uavR = 0.225; %Body radius(m)
ModelParam_motorCr = 1148; %Motor throttle-speed curve slope(rad/s)
ModelParam_motorWb =-141.4; %Motor speed-throttle curve constant term(rad/s)
ModelParam_motorT = 0.02; %Motor inertia time constant(s)
ModelParam_motorJm = 0.0001287; %Moment of inertia of motor rotor + propeller(kg.m^2)
%M=Cm*w^2
ModelParam_rotorCm = 1.779e-07; %Rotor torque coefficient(kg.m^2)
%T=Ct**w^2
ModelParam_rotorCt = 1.105e-05; %Rotor thrust coefficient(kg.m^2)
ModelParam_motorMinThr = 0.05; %Motor throttle dead zone(kg.m^2)
ModelParam_uavCd = 0.055; %Damping coefficient(N/(m/s)^2)
ModelParam_uavCCm = [0.0035 0.0039 0.0034]; %Damping moment coefficient vector(N/(m/s)^2)
ModelParam_uavDearo = 0.12; %Vertical position difference of Aerodynamic center and gravity center(m)
ModelParam_GlobalNoiseGainSwitch =0; %Noise level gain
%Environment Parameter
ModelParam_envGravityAcc = 9.8; %Gravity acceleration(m/s^2). not used.
ModelParam_envLongitude = 116.259368300000; %longitude (degree)
ModelParam_envLatitude = 40.1540302; %Latitude (degree)
ModelParam_GPSLatLong = [ModelParam_envLatitude ModelParam_envLongitude]; %Latitude and longitude
ModelParam_envAltitude = -41.5260009765625; %Reference height, down is positive
ModelParam_BusSampleRate = 0.001; %Model sampling rate
ModelParam_timeSampBaro = 0.01; % Barometer data sample time
ModelParam_timeSampTurbWind = 0.01; % Atmospheric turbulence data sample time
%%%ModelParam_BattModelEnable=int8(0);
ModelParam_BattHoverMinutes=18; %time of endurance for the battery simulation
ModelParam_BattHoverThr=0.609; % Vehilce hovering time
%GPS Parameter
ModelParam_GPSEphFinal=0.3; % GPS horizontal accuracy
ModelParam_GPSEpvFinal=0.4; % GPS vertical accuracy
ModelParam_GPSFix3DFix=3; % GPS fixed index
ModelParam_GPSSatsVisible=10; % GPS number of satellites
%Noise Parameter
ModelParam_noisePowerAccel = [0.001,0.001,0.003];% accelerometer noise power xyz in Body frame
ModelParam_noiseSampleTimeAccel = 0.001; % accelerometer noise sample time
ModelParam_noisePowerOffGainAccel = 0.04; %accelerometer noise factor without motor vibration
ModelParam_noisePowerOffGainAccelZ = 0.03; %accelerometer Z noise factor without motor vibration
ModelParam_noisePowerOnGainAccel = 0.8; %accelerometer noise factor under motor vibration
ModelParam_noisePowerOnGainAccelZ = 4.5; %accelerometer Z noise factor under motor vibration
ModelParam_noisePowerGyro = [0.00001,0.00001,0.00001]; %gyroscope noise power xyz in Body frame
ModelParam_noiseSampleTimeGyro = 0.001; % gyroscope noise sample time
ModelParam_noisePowerOffGainGyro = 0.02; %accelerometer noise factor without motor vibration
ModelParam_noisePowerOffGainGyroZ = 0.025; %accelerometer noise Z factor without motor vibration
ModelParam_noisePowerOnGainGyro = 2; %accelerometer noise factor under motor vibration
ModelParam_noisePowerOnGainGyroZ = 1; %accelerometer Z noise factor under motor vibration
ModelParam_noisePowerMag = [0.00001,0.00001,0.00001];
ModelParam_noiseSampleTimeMag = 0.01; %magnetometer sample time
ModelParam_noisePowerOffGainMag = 0.02; %magnetometer noise gain without motor magnetic field effect
ModelParam_noisePowerOffGainMagZ = 0.035;
ModelParam_noisePowerOnGainMag = 0.025; %magnetometer noise gain under motor magnetic field effect
ModelParam_noisePowerOnGainMagZ = 0.05;
ModelParam_noisePowerIMU=0;%IMU noisePower
ModelParam_noiseUpperGPS=0.5; %GPS noise upper limit (unit:m)
ModelParam_noiseGPSSampTime=0.2;%GPS Sample time (5Hz)
ModelParam_noiseUpperBaro=0; %barometer noise upper limit (unit: m)
ModelParam_noiseBaroSampTime=0.5;%barometer noise sample time
ModelParam_noiseBaroCoupleWithSpeed=0;% barometer disturbance factor caused by moving forward
ModelParam_noiseUpperWindBodyRatio=0;% wind distrubance amplitude scale factor
ModelParam_noiseWindSampTime=0.001;
ModelParam_envAirDensity = 1.225; %ideal air density (not used)
ModelParam_envDiffPressure = 0; % Differential pressure (airspeed) in millibar
ModelParam_noiseTs = 0.001;
%Failt Injection Test
ModelFailEnable = boolean(0); %is enabling failt injection test
%Battery fault simulation info.
ModelFailBatt_isEnable = boolean(0); %is injecting battery fault?
ModelFailBatt_isUseCustomHovTime = boolean(0); % is use time of endurance simulation?
ModelFailBatt_CustomHovTime=15;%the time of endurance (unit min)
ModelFailBatt_isPowOff = boolean(0);% is power off failure injected.
ModelFailBatt_isLowVoltage = boolean(0); % is low voltage failure injected
ModelFailBatt_remainVoltageRatio = 0.5; %remain voltage for low voltage failure injiection
ModelFailBatt_islowCapacity = boolean(0); % is low capacility failure injected
ModelFailBatt_remainCapacityRatio=0.2; %remain capacility for low capacility failure injection
%Propeller Model Failed
ModelFailProp_isEnable = boolean(1);% is injecting propeller failed
ModelFailProp_PropEffRatioVec = ones(1,8);%health state of the eight propeller (0:totally failed,0.x: propller thrust ratio, 1:OK);
%Payload failure injection
ModelFailLoad_isEnable = boolean(0);%is Enabling payload failure
ModelFailLoad_loadMassRatio = 0; %payload weight ratio for the vehicle weight (0 to 1)
ModelFailLoad_isLoadFall = boolean(0); %is payload droped
ModelFailLoad_isLoadShift = boolean(0); %is payload offset
ModelFailLoad_LoadShiftXRatio = 0; %x-direction offset ration 0 to 1
ModelFailLoad_LoadShiftYRatio = 0; %y-direction offset ration 0 to 1
ModelFailLoad_LoadShiftZRatio = 0; %z-direction offset ration 0 to 1
ModelFailLoad_isLoadLeak = boolean(0); %is payload slowly leaked
ModelFailLoad_LoadLeakRatioRate = 0; %leak speed %/s
%wind disturbance Failure
ModelFailWind_isEnable = boolean(0);%is enabling wind disturbance
ModelFailWind_isConstWind = boolean(0);%is constant wind disturbance
ModelFailWind_ConstWindX = 0;%constant wind X-direction speed (m/s)
ModelFailWind_ConstWindY = 0;%constant wind Y-direction speed(m/s)
ModelFailWind_ConstWindZ = 0;%constant wind Z-direction speed(m/s)
ModelFailWind_isGustWind = boolean(0);%is enabling Gust wind
ModelFailWind_GustWindStrength =0;%gust wind stregth (m/s)
ModelFailWind_GustWindFreq =0;%gust wind frequency (times/per minute)
ModelFailWind_isTurbWind = boolean(0);% is enabling atmospheric turbulence
ModelFailWind_TurbWindStrength =0;%turbulence strength
ModelFailWind_isSheerWind = boolean(0);%is enabling sheer wind disturabance
ModelFailWind_SheerWindStrength =0;%sheer wind strength
ModelFailWind_TurbWindDirec=0;%turbulence wind yaw direction
ModelFailWind_SheerWindDirec=0;%sheer wind yaw direction