sisl / Ngsim_env
Licence: mit
Learning human driver models from NGSIM data with imitation learning.
Stars: ✭ 96
Projects that are alternatives of or similar to Ngsim env
Awesome Carla
👉 CARLA resources such as tutorial, blog, code and etc https://github.com/carla-simulator/carla
Stars: ✭ 246 (+156.25%)
Mutual labels: autonomous-vehicles, reinforcement-learning, deeplearning, imitation-learning
Reinforcement learning tutorial with demo
Reinforcement Learning Tutorial with Demo: DP (Policy and Value Iteration), Monte Carlo, TD Learning (SARSA, QLearning), Function Approximation, Policy Gradient, DQN, Imitation, Meta Learning, Papers, Courses, etc..
Stars: ✭ 442 (+360.42%)
Mutual labels: jupyter-notebook, reinforcement-learning, imitation-learning
Novel Deep Learning Model For Traffic Sign Detection Using Capsule Networks
capsule networks that achieves outstanding performance on the German traffic sign dataset
Stars: ✭ 88 (-8.33%)
Mutual labels: autonomous-vehicles, jupyter-notebook, deeplearning
Release
Deep Reinforcement Learning for de-novo Drug Design
Stars: ✭ 201 (+109.38%)
Mutual labels: jupyter-notebook, reinforcement-learning, deeplearning
Tensorwatch
Debugging, monitoring and visualization for Python Machine Learning and Data Science
Stars: ✭ 3,191 (+3223.96%)
Mutual labels: jupyter-notebook, reinforcement-learning, deeplearning
Text summurization abstractive methods
Multiple implementations for abstractive text summurization , using google colab
Stars: ✭ 359 (+273.96%)
Mutual labels: jupyter-notebook, reinforcement-learning, deeplearning
Basic reinforcement learning
An introductory series to Reinforcement Learning (RL) with comprehensive step-by-step tutorials.
Stars: ✭ 826 (+760.42%)
Mutual labels: jupyter-notebook, reinforcement-learning, deeplearning
Awesome Decision Making Reinforcement Learning
A selection of state-of-the-art research materials on decision making and motion planning.
Stars: ✭ 68 (-29.17%)
Mutual labels: autonomous-vehicles, reinforcement-learning
Rl Workshop
Reinforcement Learning Workshop for Data Science BKK
Stars: ✭ 73 (-23.96%)
Mutual labels: jupyter-notebook, reinforcement-learning
Deep learning for biologists with keras
tutorials made for biologists to learn deep learning
Stars: ✭ 74 (-22.92%)
Mutual labels: jupyter-notebook, deeplearning
Mathy
Tools for using computer algebra systems to solve math problems step-by-step with reinforcement learning
Stars: ✭ 79 (-17.71%)
Mutual labels: jupyter-notebook, reinforcement-learning
Sru Deeplearning Workshop
دوره 12 ساعته یادگیری عمیق با چارچوب Keras
Stars: ✭ 66 (-31.25%)
Mutual labels: jupyter-notebook, deeplearning
Pgdrive
PGDrive: an open-ended driving simulator with infinite scenes from procedural generation
Stars: ✭ 60 (-37.5%)
Mutual labels: reinforcement-learning, imitation-learning
Polyaxon Examples
Code for polyaxon tutorials and examples
Stars: ✭ 57 (-40.62%)
Mutual labels: jupyter-notebook, deeplearning
Reinforcement Learning
Reinforcement learning material, code and exercises for Udacity Nanodegree programs.
Stars: ✭ 77 (-19.79%)
Mutual labels: jupyter-notebook, reinforcement-learning
Reinforcement Learning
Implementation of Reinforcement Learning algorithms in Python, based on Sutton's & Barto's Book (Ed. 2)
Stars: ✭ 55 (-42.71%)
Mutual labels: jupyter-notebook, reinforcement-learning
Mit Deep Learning
Tutorials, assignments, and competitions for MIT Deep Learning related courses.
Stars: ✭ 8,912 (+9183.33%)
Mutual labels: jupyter-notebook, deeplearning
Tensorflow Tutorials
TensorFlow Tutorials with YouTube Videos
Stars: ✭ 8,919 (+9190.63%)
Mutual labels: jupyter-notebook, reinforcement-learning
Hand dapg
Repository to accompany RSS 2018 paper on dexterous hand manipulation
Stars: ✭ 88 (-8.33%)
Mutual labels: reinforcement-learning, imitation-learning
NGSIM Env
- This is a rllab environment for learning human driver models with imitation learning
Description
- This repository does not contain a gail / infogail / hgail implementation
- The reason ngsim_env does not contain the GAIL algorithm implementation is to enable the codebase to be more modular. This design decision enables ngsim_env to be used as an environment in which any imitation learning algorithm can be tested. Similarly, this design decision enables the GAIL algorithm to be a separate module that can be tested in any environment be that ngsim_env or otherwise. The installation process below gets the GAIL implementation from sisl/hgail
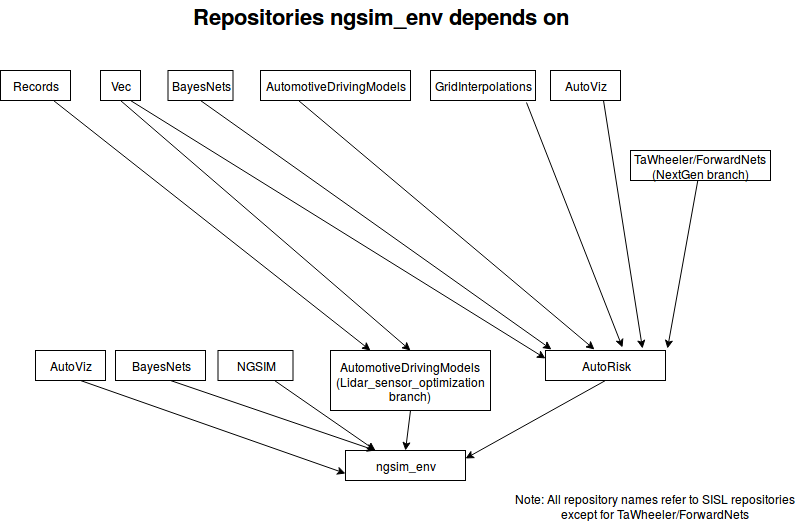
- It also does not contain the human driver data you need for the environment to work. The installation process below gets the data from sisl/NGSIM.jl.
- Figure below shows a diagram of the repositories ngsim_env depends on:

Installation Process
Step-by-step install instructions are at docs/install_env_gail_full.md
Train and run a single agent GAIL policy:
- Navigate to ngsim_env/scripts/imitation
- Train a policy, this involves running imitate.py
python imitate.py --exp_name NGSIM-gail --n_itr 1000 --policy_recurrent True
- Run the trained policy by using it to drive a car (this creates trajectories on all NGSIM sections using the trained policy). The training step was called imitate. This step is called validate.
python validate.py --n_proc 5 --exp_dir ../../data/experiments/NGSIM-gail/ --params_filename itr_1000.npz --random_seed 42
- Visualize the results: Open up a jupyter notebook and use the visualize*.ipynb files.
- the visualize family of ipynb's have headers at the top of each file describing what it does.
- visualize.ipynb is for extracting the Root Mean Square Error
- visualize_trajectories.ipynb creates videos such as the one shown below in the demo section
- visualize_emergent.ipynb calculates the emergent metrics such as offroad duration and collision rate
Training process: details
- see
docs/training.md
How this works?
- See README files individual directories for details, but a high-level description is:
- The python code uses pyjulia to instantiate a Julia interpreter, see the
pythondirectory for details - The driving environment is then built in Julia, see the
juliadirectory for details - Each time the environment is stepped forward, execution passes from python to julia, updating the environment
Demo
To reproduce our experiments for the multiagent gail paper submitted to IROS, see
GAIL in a single-agent environment

Single agent GAIL (top) and PS-GAIL (bottom) in a multi-agent environment

References
If you found this library useful in your research, please consider citing our paper and/or paper:
@inproceedings{bhattacharyya2018multi,
title={Multi-agent imitation learning for driving simulation},
author={Bhattacharyya, Raunak P and Phillips, Derek J and Wulfe, Blake and Morton, Jeremy and Kuefler, Alex and Kochenderfer, Mykel J},
booktitle={2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={1534--1539},
year={2018},
organization={IEEE}
}
@article{bhattacharyya2019simulating,
title={Simulating Emergent Properties of Human Driving Behavior Using Multi-Agent Reward Augmented Imitation Learning},
author={Bhattacharyya, Raunak P and Phillips, Derek J and Liu, Changliu and Gupta, Jayesh K and Driggs-Campbell, Katherine and Kochenderfer, Mykel J},
journal={arXiv preprint arXiv:1903.05766},
year={2019}
}
Note that the project description data, including the texts, logos, images, and/or trademarks,
for each open source project belongs to its rightful owner.
If you wish to add or remove any projects, please contact us at [email protected].