Micro XRCE-DDS Agent








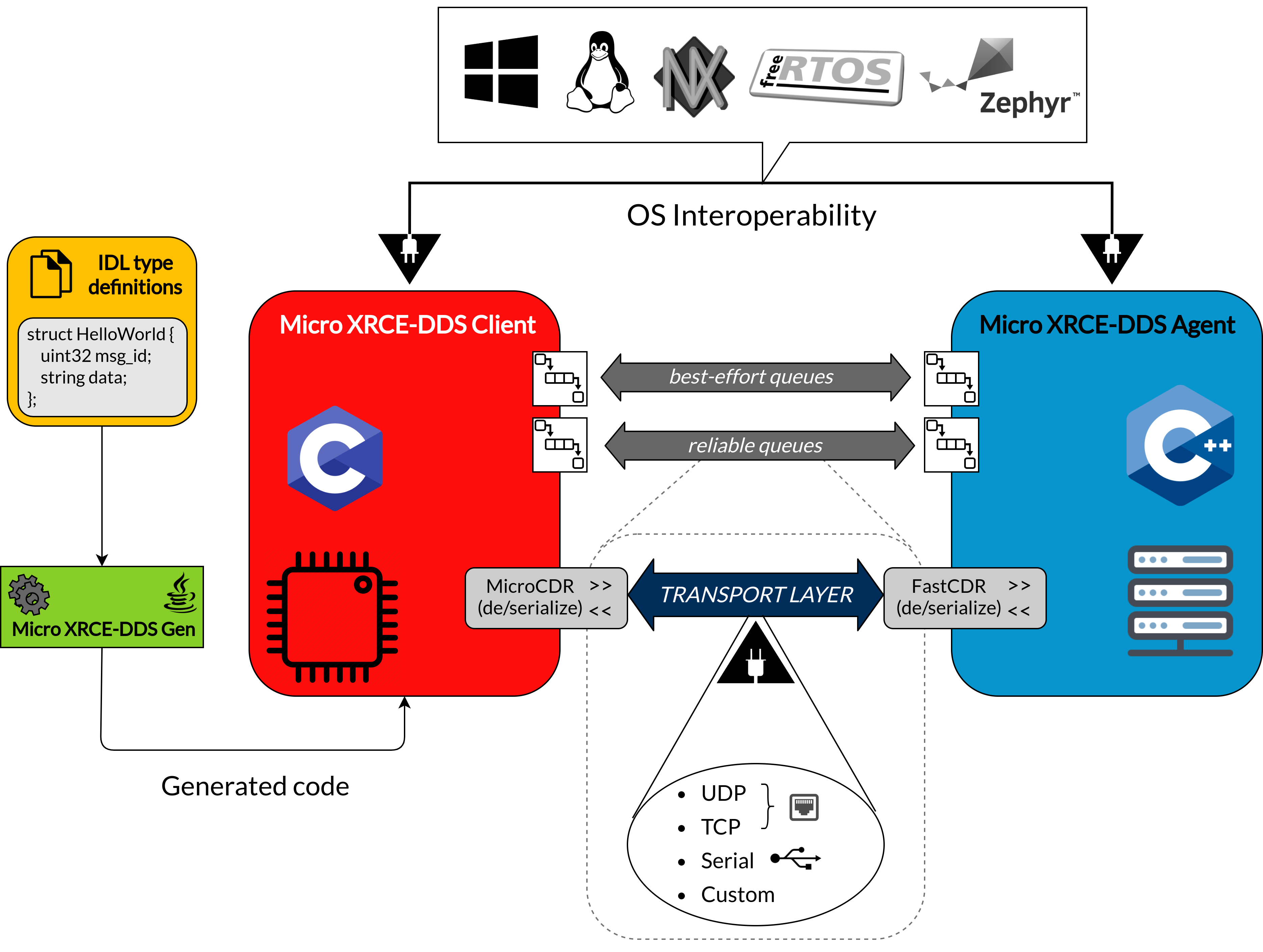
eProsima Micro XRCE-DDS is a library implementing the DDS-XRCE protocol as defined and maintained by the OMG, whose aim is to allow resource constrained devices such as microcontrollers to communicate with the DDS world as any other DDS actor would do. It follows a client/server paradigm and is composed by two libraries, the Micro XRCE-DDS Client and the Micro XRCE-DDS Agent. The Micro XRCE-DDS Clients are lightweight entities meant to be compiled on eXtremely Resource Constrained Environments, while the Micro XRCE-DDS Agent is a broker which bridges the Clients with the DDS world.
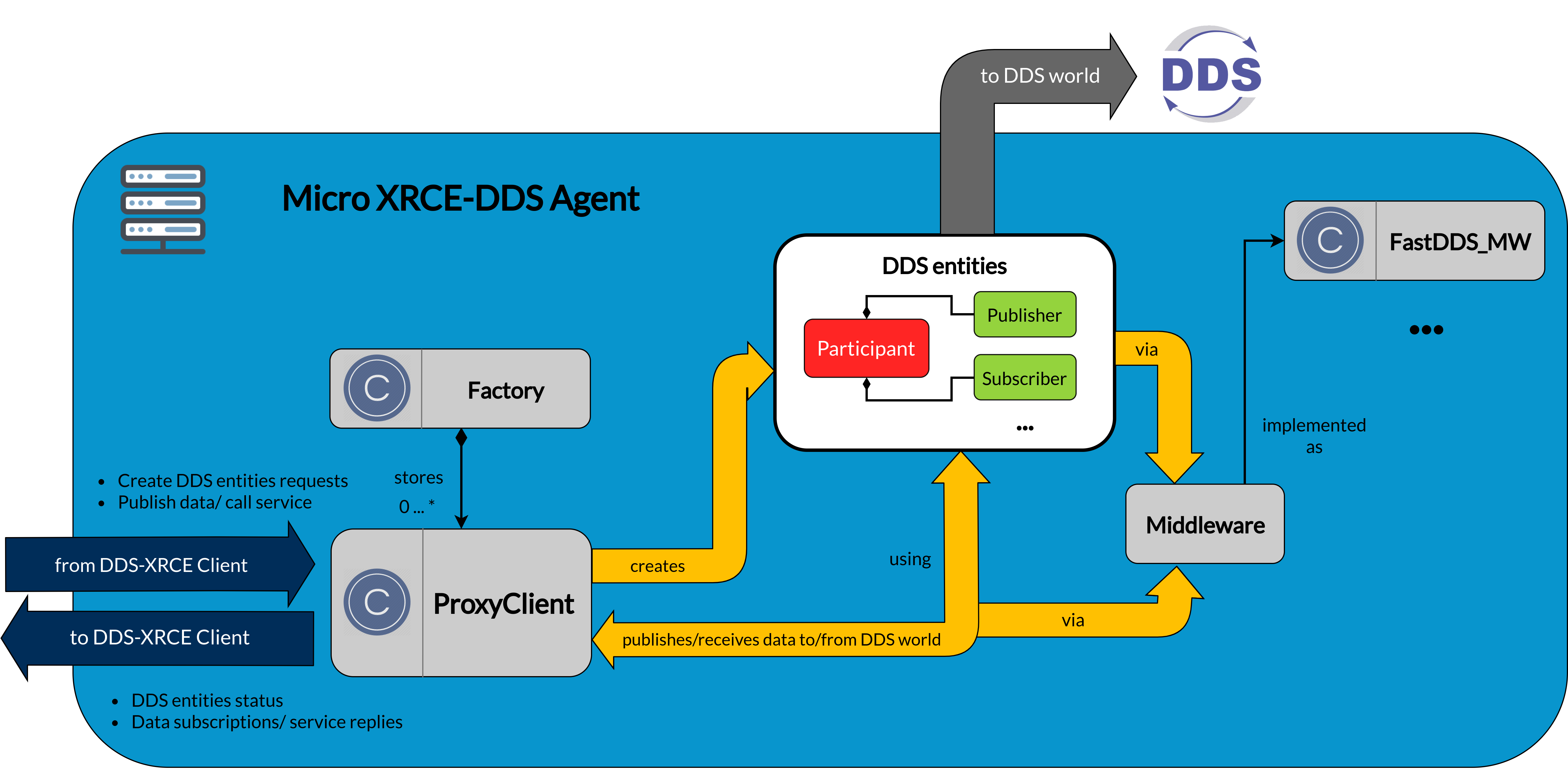
The Micro XRCE-DDS Agent receives messages containing request operations from the Clients to publish and subscribe to topics in the DDS global dataspace. Remote procedure calls, as defined by the DDS-RPC standard, are also supported, allowing to communicate according to a request/reply paradigm. The Agent then processes these requests and sends back a response with the operation status result and with the requested data, in the case of subscribe/reply operations.
Agents keep track of the Clients by means of a dedicated ProxyClient entity that acts on behalf of the latter.
This is made possible by the creation of DDS Entities on the Agent as a result of Clients' operations, such as Participants, Topics, Publishers, and Subscribers, which can interact with the DDS global dataspace.
The communication between a Micro XRCE-DDS Client and a Micro XRCE-DDS Agent is achieved by means of several kinds of built-in transports: UDPv4, UDPv6, TCPv4, TCPv6 and Serial communication. In addition, there is the possibility for the user to generate its own Custom transport. An Agent using any of these built-in transports can be launched by means of the standalone executable generated when building the project, which comes with a built-in CLI tool to select among the transports listed above.
This built-in Agent can also be installed and launched using the provided Snap package or the provided Docker image.
Documentation
You can access the eProsima Micro XRCE-DDS user documentation online, which is hosted on Read the Docs.
Getting Help
If you need support you can reach us by mail at [email protected] or by phone at +34 91 804 34 48.