2013fangwentao / Multi_sensor_fusion
Licence: gpl-3.0
Multi-Sensor Fusion (GNSS, IMU, Camera) 多源多传感器融合定位 GPS/INS组合导航 PPP/INS紧组合
Stars: ✭ 357
Projects that are alternatives of or similar to Multi sensor fusion
Eskf
ROS Error-State Kalman Filter based on PX4/ecl. Performs GPS/Magnetometer/Vision Pose/Optical Flow/RangeFinder fusion with IMU
Stars: ✭ 63 (-82.35%)
Mutual labels: gps, imu, vision
Location
Smartphone navigation positionning, fusion GPS and IMU sensors.
Stars: ✭ 87 (-75.63%)
Mutual labels: fusion, gps, imu
Navego
NaveGo: an open-source MATLAB/GNU Octave toolbox for processing integrated navigation systems and performing inertial sensors analysis.
Stars: ✭ 294 (-17.65%)
Mutual labels: gps, imu, navigation
ios logger
Application for camera and sensor data logging (iOS)
Stars: ✭ 60 (-83.19%)
Mutual labels: camera, gps, imu
Urbannavdataset
UrbanNav: an Open-Sourcing Localization Data Collected in Asian Urban Canyons, Including Tokyo and Hong Kong
Stars: ✭ 79 (-77.87%)
Mutual labels: camera, imu
React Native Vision Camera
📸 The Camera library that sees the vision.
Stars: ✭ 443 (+24.09%)
Mutual labels: camera, vision
Kalibr
The Kalibr visual-inertial calibration toolbox
Stars: ✭ 2,410 (+575.07%)
Mutual labels: camera, imu
Visual Gps Slam
This is a repo for my master thesis research about the Fusion of Visual SLAM and GPS. It contains the research paper, code and other interesting data.
Stars: ✭ 175 (-50.98%)
Mutual labels: fusion, gps
ESP32 IMU BARO GPS VARIO
GPS altimeter/variometer with LCD display, routes with waypoints, data/gps track logging, bluetooth NMEA sentence transmission, wifi AP + webpage configuration
Stars: ✭ 72 (-79.83%)
Mutual labels: gps, imu
imu ekf
6-axis(3-axis acceleration sensor+3-axis gyro sensor) IMU fusion with Extended Kalman Filter.
Stars: ✭ 56 (-84.31%)
Mutual labels: imu, fusion
vision-camera-image-labeler
VisionCamera Frame Processor Plugin to label images using MLKit Vision
Stars: ✭ 62 (-82.63%)
Mutual labels: camera, vision
Map Based Visual Localization
A general framework for map-based visual localization. It contains 1) Map Generation which support traditional features or deeplearning features. 2) Hierarchical-Localizationvisual in visual(points or line) map. 3)Fusion framework with IMU, wheel odom and GPS sensors.
Stars: ✭ 229 (-35.85%)
Mutual labels: gps, imu
Nextlevel
NextLevel was initally a weekend project that has now grown into a open community of camera platform enthusists. The software provides foundational components for managing media recording, camera interface customization, gestural interaction customization, and image streaming on iOS. The same capabilities can also be found in apps such as Snapchat, Instagram, and Vine.
Stars: ✭ 1,940 (+443.42%)
Mutual labels: camera, vision
Marine Api
Java Marine API - NMEA 0183 library for Java
Stars: ✭ 174 (-51.26%)
Mutual labels: gps, navigation
AutonomousPrecisionLanding
Precision landing on a visual target using OpenCV and dronekit-python
Stars: ✭ 31 (-91.32%)
Mutual labels: navigation, vision
VisionLab
📺 A framework with common source code for demo projects that use Vision Framework
Stars: ✭ 32 (-91.04%)
Mutual labels: camera, vision
Loose Gnss Imu
Loosely coupled integration of GNSS and IMU
Stars: ✭ 97 (-72.83%)
Mutual labels: gps, imu
Trail Sense
An Android app that uses your phone's sensors to assist with wilderness treks or survival situations.
Stars: ✭ 144 (-59.66%)
Mutual labels: gps, navigation
Multi-Sensor Fusion
版本号:release/3.0.0
初衷
- 学习组合导航和VIO相关内容.
- 希望和有兴趣的小伙伴一起交流
程序依赖
- glog
- Eigen
- OpenCV 3.4
- Ceres
使用说明
最新稳定测试版本对应为release/3.0.0分支 Multi-Sensor Fusion使用了submodules形式挂载了tools,因此clone完本程序需要更新tools
git checkout -b release/3.0.0 origin/release/3.0.0
git submodule init
git submodule update
已经安装完依赖库后,可以直接编译程序
mkdir build && cd build
cmake .. && make -j3
程序运行方式
./mscnav_bin ${configure_file} ${log_dir}
代码架构简要说明
| 文件夹名 | 主要作用 |
|---|---|
| config | 示例数据配置文件 |
| doc | 一些参考文档 |
| exec | 主程序文件 |
| include | 头文件,按照不同功能下面包含子文件夹 |
| script | 一些脚本工具 |
| src | 核心功能的源代码文件 |
| submodules | 子模块,目前仅挂载tools基本工具 |
| test | 一些测试代码 |
| tools | 一些小工具 |
| example_process | 示例数据的百度云链接 |
功能
- 支持GNSS/INS松组合解算
- 支持GNSS/INS/Camera融合解算
- 支持纯惯导推算
- 支持VIO解算,不过需要利用GNSS数据进行全局的初始化
结果示例
数据说明
-
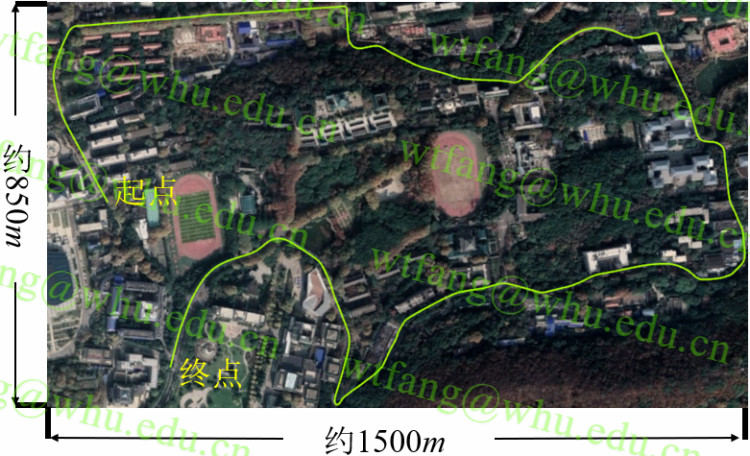
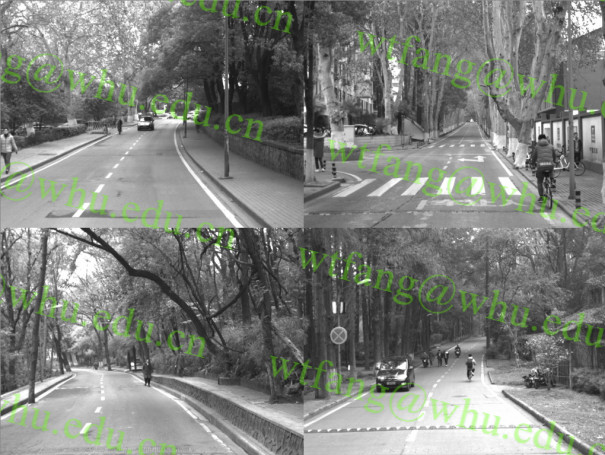
采集环境及路线


- 卫星观测情况(GPS+BDS)

vio结果
 vio测试区间:全长770m
vio测试区间:全长770m
 纯惯导和vio定位结果
纯惯导和vio定位结果
 纯惯导和vio定姿结果
纯惯导和vio定姿结果
 轨迹对比图
轨迹对比图
结果统计[位置:m,角度:deg] -|North|East|Down|误差漂移|Roll|Pitch|Heading :-:|:-:|:-:|:-:|:-:|:-:|:-:|:-: 纯惯导推算|-1416.3|-3412.4|-40.6|479.8%|1.300|1.400|1.072 视觉/惯性里程计|-2.594|4.209|1.578|0.67%|0.104|0.106|0.319
GNSS-INS-Camera结果
 定位误差图[m]
(上:单频PPP定位;中:单频PPP/INS紧组合定位; 下:GNSS-INS-camera定位)
定位误差图[m]
(上:单频PPP定位;中:单频PPP/INS紧组合定位; 下:GNSS-INS-camera定位)
 定姿误差图[deg]
(上:单频PPP/INS紧组合定姿; 下:GNSS-INS-camera定姿)
定姿误差图[deg]
(上:单频PPP/INS紧组合定姿; 下:GNSS-INS-camera定姿)
结果统计[位置:m,角度:deg] -|H|V|3D|提升|Roll|Pitch|Heading|提升 :-:|:-:|:-:|:-:|:-:|:-:|:-:|:-:|:-: PPP定位|1.970|4.429|4.847|——|——|——|——|—— 大气增强PPP/INS紧组合|1.658|3.014|3.439|29.04%|0.132 |0.198 |0.661 |—— 大气增强PPP/INS/视觉融合|1.529|2.255|2.725|43.79%|0.131 |0.169 |0.389 |41.10%
注:GNSS PPP/INS紧组合部分代码并不在此开源,有兴趣可以私聊联系
如果基于RTK技术实现GNSS定位的话,定位效果肯定好于示例结果,之所以采用PPP技术,因为PPP不依赖于基准站,成本和操作难度都更低
讨论交流
- QQ: 1280269817
- e-mail: [email protected] [email protected]
Note that the project description data, including the texts, logos, images, and/or trademarks,
for each open source project belongs to its rightful owner.
If you wish to add or remove any projects, please contact us at [email protected].