PREDATOR: Registration of 3D Point Clouds with Low Overlap (CVPR 2021, Oral)
This repository represents the official implementation of the paper:
PREDATOR: Registration of 3D Point Clouds with Low Overlap
*Shengyu Huang, *Zan Gojcic, Mikhail Usvyatsov, Andreas Wieser, Konrad Schindler
|ETH Zurich | * Equal contribution
For implementation using MinkowskiEngine backbone, please check this
For more information, please see the project website
Contact
If you have any questions, please let us know:
- Shengyu Huang {[email protected]}
- Zan Gojcic {[email protected]}
News
- 2021-08-09: We've updated arxiv version of our paper with improved performance!
- 2021-06-02: Fix feature gathering bug in k-nn graph, please see improved performance in this issue. Stay tunned for updates on other experiments!
- 2021-05-31: Check our video and poster on project page!
- 2021-03-25: Camera ready is on arXiv! I also gave a talk on Predator(中文), you can find the recording here: Bilibili, Youtube
- 2021-02-28: MinkowskiEngine-based PREDATOR release
- 2020-11-30: Code and paper release
Instructions
This code has been tested on
- Python 3.8.5, PyTorch 1.7.1, CUDA 11.2, gcc 9.3.0, GeForce RTX 3090/GeForce GTX 1080Ti
Note: We observe random data loader crashes due to memory issues, if you observe similar issues, please consider reducing the number of workers or increasing CPU RAM. We now released a sparse convolution-based Predator, have a look here!
Requirements
To create a virtual environment and install the required dependences please run:
git clone https://github.com/overlappredator/OverlapPredator.git
virtualenv predator; source predator/bin/activate
cd OverlapPredator; pip install -r requirements.txt
cd cpp_wrappers; sh compile_wrappers.sh; cd ..in your working folder.
Datasets and pretrained models
For KITTI dataset, please follow the instruction on KITTI Odometry website to download the KITTI odometry training set.
We provide
- preprocessed 3DMatch pairwise datasets (voxel-grid subsampled fragments together with their ground truth transformation matrices)
- raw dense 3DMatch datasets
- modelnet dataset
- pretrained models on 3DMatch, KITTI and Modelnet
The preprocessed data and models can be downloaded by running:
sh scripts/download_data_weight.shTo download raw dense 3DMatch data, please run:
wget --no-check-certificate --show-progress https://share.phys.ethz.ch/~gsg/pairwise_reg/3dmatch.zip
unzip 3dmatch.zipThe folder is organised as follows:
3dmatchtrain7-scenes-chessfragmentscloud_bin_*.ply- ...
posescloud_bin_*.txt- ...
- ...
test
3DMatch(Indoor)
Train
After creating the virtual environment and downloading the datasets, Predator can be trained using:
python main.py configs/train/indoor.yamlEvaluate
For 3DMatch, to reproduce Table 2 in our main paper, we first extract features and overlap/matachability scores by running:
python main.py configs/test/indoor.yamlthe features together with scores will be saved to snapshot/indoor/3DMatch. The estimation of the transformation parameters using RANSAC can then be carried out using:
for N_POINTS in 250 500 1000 2500 5000
do
python scripts/evaluate_predator.py --source_path snapshot/indoor/3DMatch --n_points $N_POINTS --benchmark 3DMatch --exp_dir snapshot/indoor/est_traj --sampling prob
donedependent on n_points used by RANSAC, this might take a few minutes. The final results are stored in snapshot/indoor/est_traj/{benchmark}_{n_points}_prob/result. To evaluate PREDATOR on 3DLoMatch benchmark, please also change 3DMatch to 3DLoMatch in configs/test/indoor.yaml.
Demo
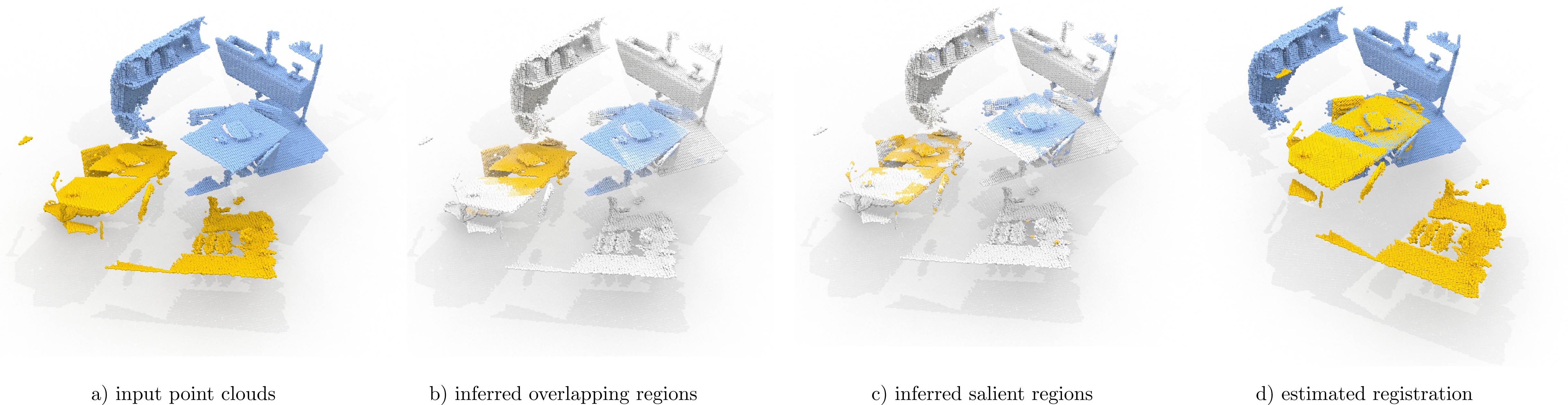
We prepared a small demo, which demonstrates the whole Predator pipeline using two random fragments from the 3DMatch dataset. To carry out the demo, please run:
python scripts/demo.py configs/test/indoor.yamlThe demo script will visualize input point clouds, inferred overlap regions, and point cloud aligned with the estimated transformation parameters:

ModelNet(Synthetic)
Train
To train PREDATOR on ModelNet, please run:
python main.py configs/train/modelnet.yaml
We provide a small script to evaluate Predator on ModelNet test set, please run:
python main.py configs/test/modelnet.yaml
The rotation and translation errors could be better/worse than the reported ones due to randomness in RANSAC.
KITTI(Outdoor)
We provide a small script to evaluate Predator on KITTI test set, after configuring KITTI dataset, please run:
python main.py configs/test/kitti.yaml
the results will be saved to the log file.
Custom dataset
We have a few tips for train/test on custom dataset
- If it's similar indoor scenes, please run
demo.pyfirst to check the generalisation ability before retraining - Remember to voxel-downsample the data in your data loader, see
kitti.pyfor reference
Citation
If you find this code useful for your work or use it in your project, please consider citing:
@InProceedings{Huang_2021_CVPR,
author = {Huang, Shengyu and Gojcic, Zan and Usvyatsov, Mikhail and Wieser, Andreas and Schindler, Konrad},
title = {Predator: Registration of 3D Point Clouds With Low Overlap},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
month = {June},
year = {2021},
pages = {4267-4276}
}Acknowledgments
In this project we use (parts of) the official implementations of the followin works:
- FCGF (KITTI preprocessing)
- D3Feat (KPConv backbone)
- 3DSmoothNet (3DMatch preparation)
- MultiviewReg (3DMatch benchmark)
- SuperGlue (Transformer part)
- DGCNN (self-gnn)
- RPMNet (ModelNet preprocessing and evaluation)
We thank the respective authors for open sourcing their methods. We would also like to thank reviewers, especially reviewer 2 for his/her valuable inputs.