garyli1019 / Pointnet Keras
Licence: mit
Keras implementation for Pointnet
Stars: ✭ 110
Programming Languages
python
139335 projects - #7 most used programming language
Projects that are alternatives of or similar to Pointnet Keras
3d Pointcloud
Papers and Datasets about Point Cloud.
Stars: ✭ 179 (+62.73%)
Mutual labels: classification, point-cloud, segmentation
Grid Gcn
Grid-GCN for Fast and Scalable Point Cloud Learning
Stars: ✭ 143 (+30%)
Mutual labels: classification, point-cloud, segmentation
Pointnet
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation
Stars: ✭ 3,517 (+3097.27%)
Mutual labels: classification, point-cloud, segmentation
Pointasnl
PointASNL: Robust Point Clouds Processing using Nonlocal Neural Networks with Adaptive Sampling (CVPR 2020)
Stars: ✭ 159 (+44.55%)
Mutual labels: classification, point-cloud, segmentation
Pointclouddatasets
3D point cloud datasets in HDF5 format, containing uniformly sampled 2048 points per shape.
Stars: ✭ 80 (-27.27%)
Mutual labels: classification, point-cloud, segmentation
Pointcnn
PointCNN: Convolution On X-Transformed Points (NeurIPS 2018)
Stars: ✭ 1,120 (+918.18%)
Mutual labels: classification, point-cloud, segmentation
Dgcnn.pytorch
A PyTorch implementation of Dynamic Graph CNN for Learning on Point Clouds (DGCNN)
Stars: ✭ 153 (+39.09%)
Mutual labels: classification, point-cloud, segmentation
Pointnet2
PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space
Stars: ✭ 2,197 (+1897.27%)
Mutual labels: classification, point-cloud, segmentation
Point2Sequence
Point2Sequence: Learning the Shape Representation of 3D Point Clouds with an Attention-based Sequence to Sequence Network
Stars: ✭ 34 (-69.09%)
Mutual labels: point-cloud, classification, segmentation
Segmentation
Tensorflow implementation : U-net and FCN with global convolution
Stars: ✭ 101 (-8.18%)
Mutual labels: classification, segmentation
Ttach
Image Test Time Augmentation with PyTorch!
Stars: ✭ 455 (+313.64%)
Mutual labels: classification, segmentation
Cilantro
A lean C++ library for working with point cloud data
Stars: ✭ 577 (+424.55%)
Mutual labels: point-cloud, segmentation
Open3d Pointnet2 Semantic3d
Semantic3D segmentation with Open3D and PointNet++
Stars: ✭ 342 (+210.91%)
Mutual labels: classification, point-cloud
Tianchi Medical Lungtumordetect
天池医疗AI大赛[第一季]:肺部结节智能诊断 UNet/VGG/Inception/ResNet/DenseNet
Stars: ✭ 314 (+185.45%)
Mutual labels: classification, segmentation
Superpoint graph
Large-scale Point Cloud Semantic Segmentation with Superpoint Graphs
Stars: ✭ 533 (+384.55%)
Mutual labels: point-cloud, segmentation
Depth clustering
🚕 Fast and robust clustering of point clouds generated with a Velodyne sensor.
Stars: ✭ 657 (+497.27%)
Mutual labels: point-cloud, segmentation
Gacnet
Pytorch implementation of 'Graph Attention Convolution for Point Cloud Segmentation'
Stars: ✭ 103 (-6.36%)
Mutual labels: point-cloud, segmentation
Cvpods
All-in-one Toolbox for Computer Vision Research.
Stars: ✭ 277 (+151.82%)
Mutual labels: classification, segmentation
All About The Gan
All About the GANs(Generative Adversarial Networks) - Summarized lists for GAN
Stars: ✭ 630 (+472.73%)
Mutual labels: classification, segmentation
Edafa
Test Time Augmentation (TTA) wrapper for computer vision tasks: segmentation, classification, super-resolution, ... etc.
Stars: ✭ 107 (-2.73%)
Mutual labels: classification, segmentation
pointnet-keras
Original tensorflow implementation: https://github.com/charlesq34/pointnet
Package requirement: Python3.6, keras, tensorflow, numpy, matplotlib, h5py
Results
Segmentation Sample

How to Run code:
Classification:
- Download the aligned dataset from Link
- Put all traning
.h5files underPrepdatafolder, all testing.h5files underPrepdata_testfolder - Run train_cls.py. Accuracy rate will be 82.5%, which is slightly lower than the original implementation.
Segmentation:
- Download and unzip the shapenet dataset from Link.
- Run Seg_dataprep.py then train_seg.py.
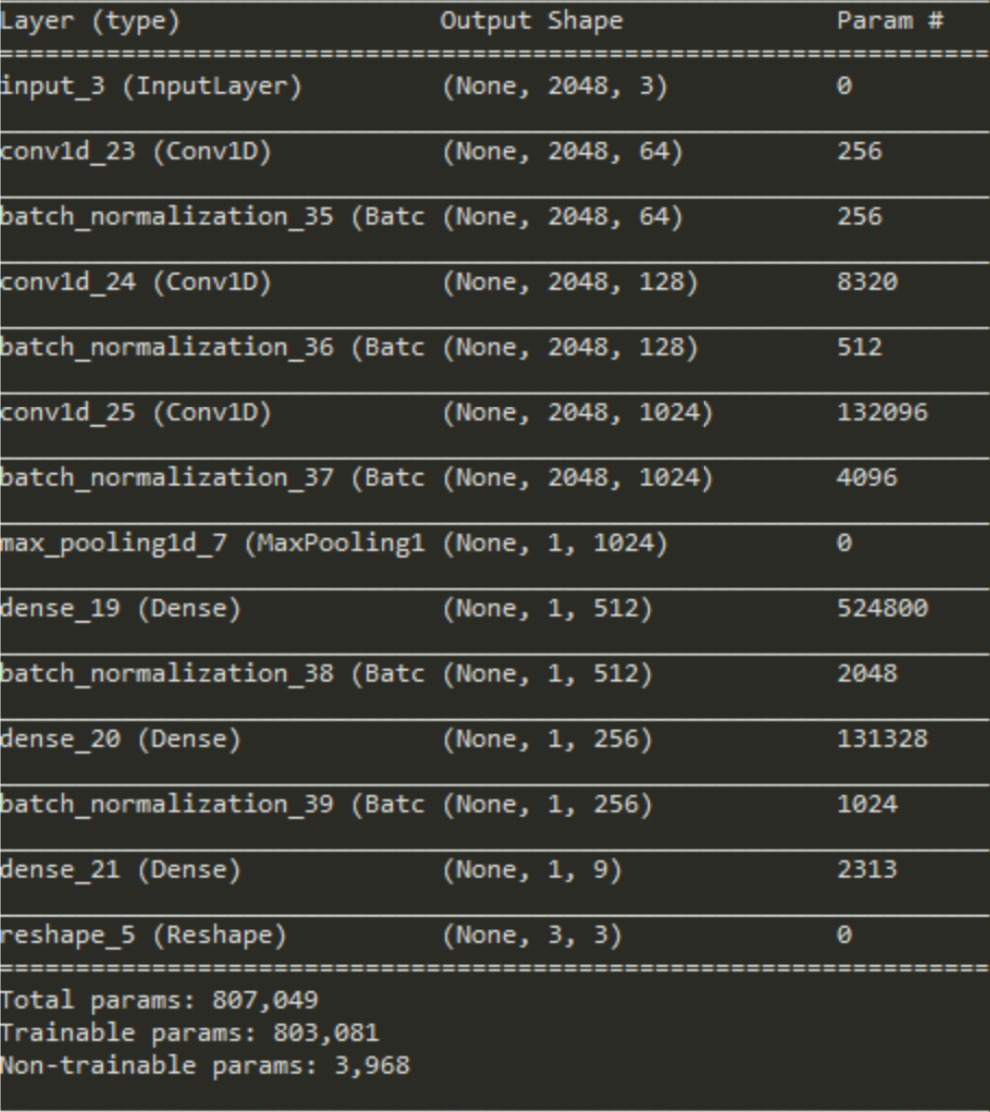
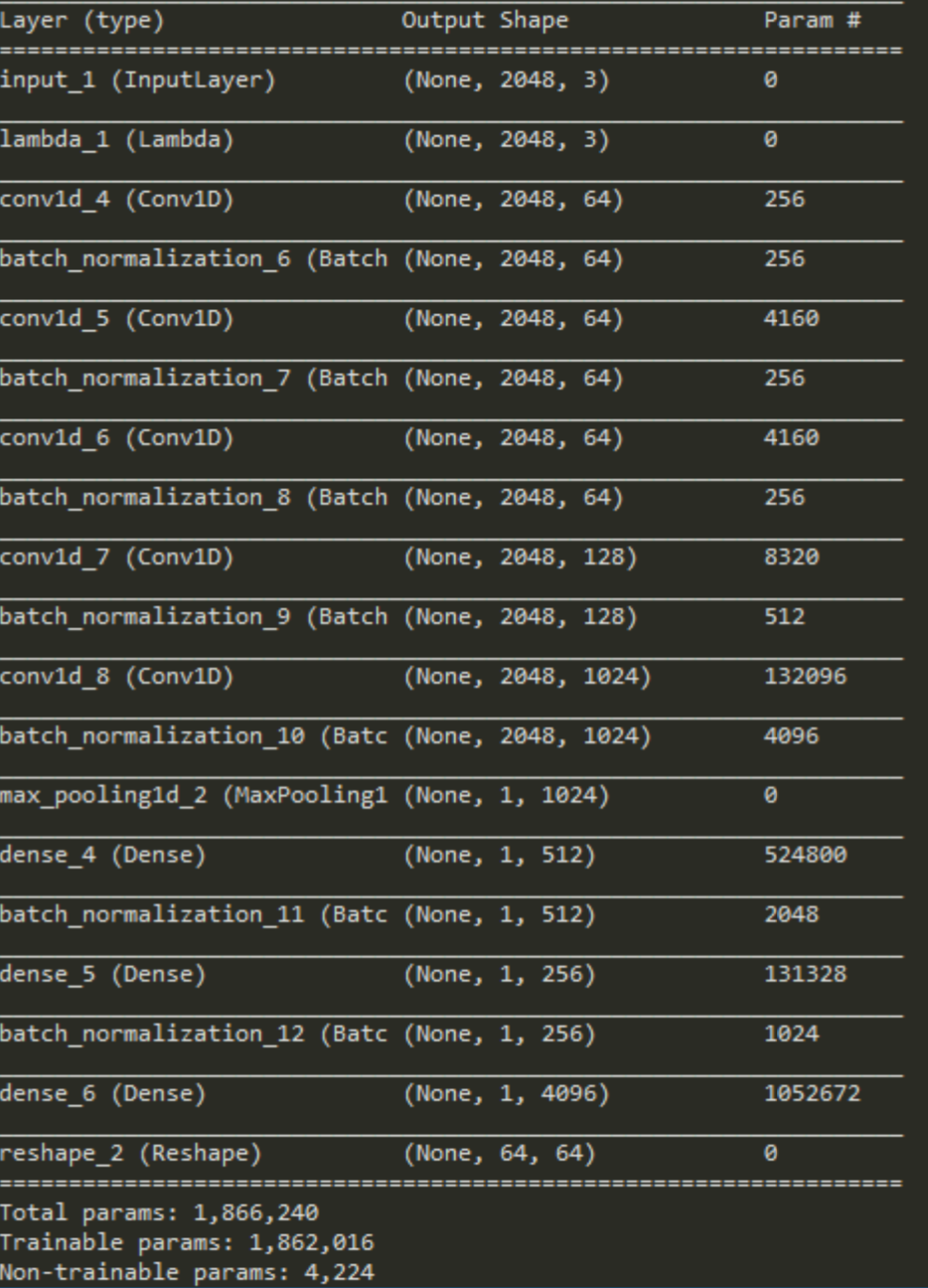
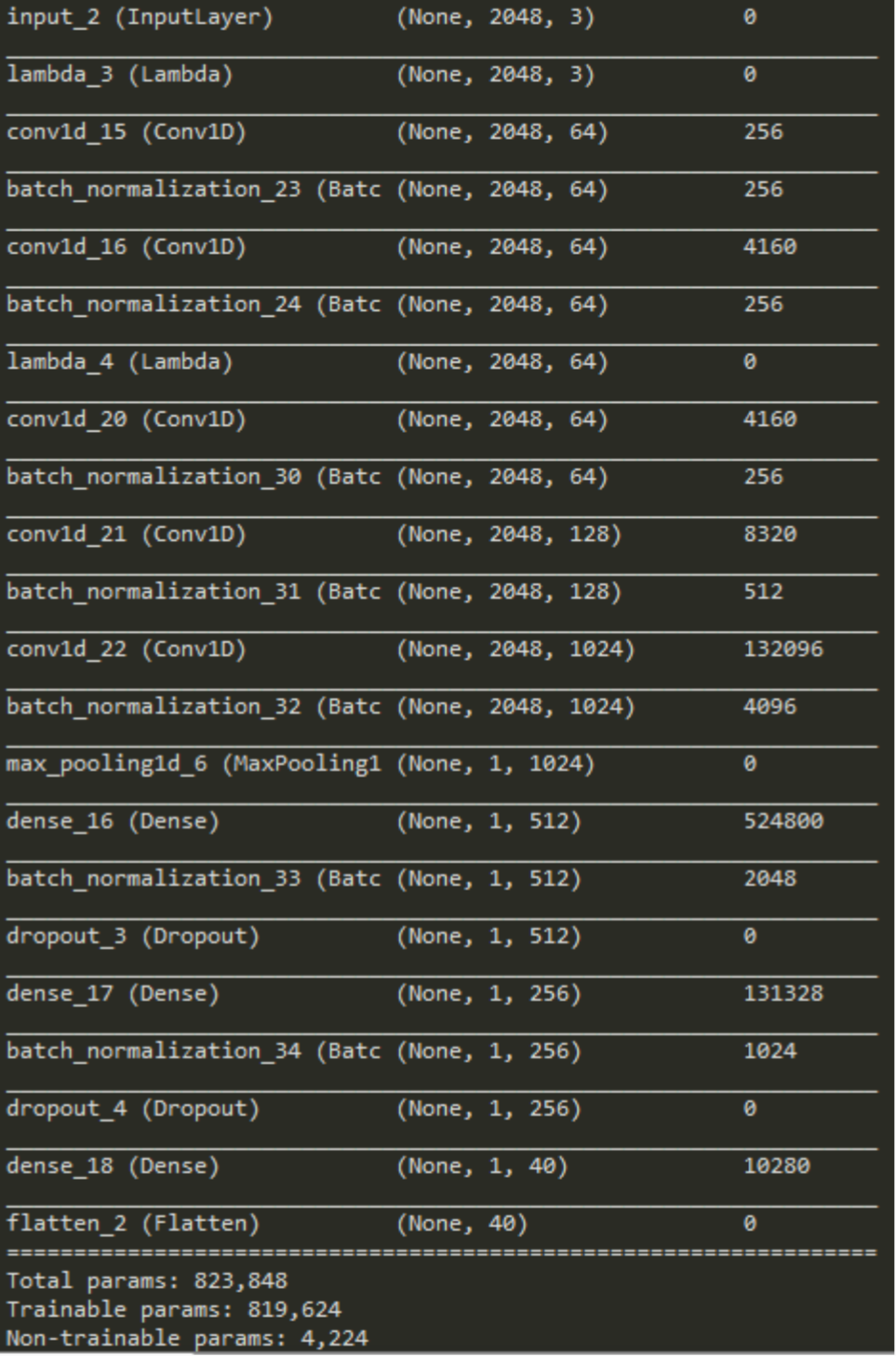
Point Architecture
-
Input Transformation Net: Input: Nx3 point cloud sample, Output: 3x3 transformation net
-
Feature Transformation Net:
-
Global Feature: Input: Nx3 point cloud sample multiply input T_net. Output: 1*1024 global feature
-
Classification Net: Input: Nx3 point cloud sample multiply input T_net. Output: 1x40 softmax prediction



Note that the project description data, including the texts, logos, images, and/or trademarks,
for each open source project belongs to its rightful owner.
If you wish to add or remove any projects, please contact us at [email protected].