3D-Scene-Graph: A Sparse and Semantic Representation of Physical Environments for Intelligent Agents
This work is based on our paper (IEEE Transactions on Cybernetics 2019, accepted). We proposed a new concept called 3D scene graph and its construction framework. Our work is based on FactorizableNet, implemented in Pytorch.
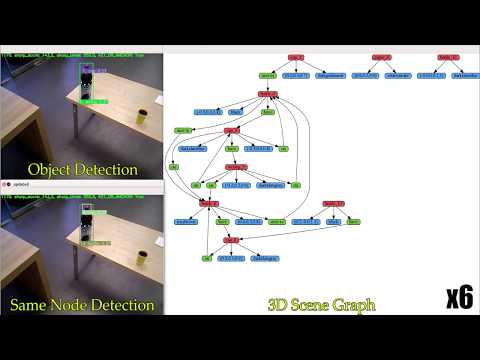
3D Scene Graph Construction Framework
The proposed 3D scene graph construction framework extracts relevant semantics within environments such as object categories and relations between objects as well as physical attributes
such as 3D positions and major colors in the process of generating 3D scene graphs for the given environments. The framework receives a sequence of observations regarding the environments in the form of RGB-D image frames.
For robust performance, the framework filters out unstable observations(i.e., blurry images)
using the proposed adaptive blurry image detection algorithm.
Then, the framework factors out keyframe groups to avoid redundant processing of the same information.
Keyframe groups contain reasonably-overlapping frames. Next, the framework extracts semantics and physical attributes
within the environments through recognition modules.
During the recognition processes, spurious detections get rejected and missing entities are supplemented.
Finally, the gathered information gets fused into 3D scene graph and the graph gets updated upon new observations.

Requirements
- Ubuntu 16.04+
- Python 2.7
- Pytorch 0.3.1
- torchtext 0.2.3
- FactorizableNet
- ScanNet dataset (optional, used for test. an RGBD video from ScanNet is enough.)
Installation
Install Pytorch 0.3.1. The code has been tested only with Python 2.7, CUDA 9.0 on Ubuntu 16.04. You will need to modify a significant amount of code if you want to run in a different environment (Python 3+ or Pytorch 0.4+).
- Download 3D-Scene-Graph repository
git clone --recurse-submodules https://github.com/Uehwan/3D-Scene-Graph.git
- Install FactorizableNet
cd 3D-Scene-Graph/FactorizableNet
Please follow the installation instructions in FactorizableNet repository. Follow steps 1 through 6. You can skip step 7. Download VG-DR-Net in step 8. You do not need to download other models.
- Install 3D-Scene-Graph
cd 3D-Scene-Graph
touch FactorizableNet/__init__.py
ln -s ./FactorizableNet/options/ options
mkdir data
ln -s ./FactorizableNet/data/svg data/svg
ln -s ./FactorizableNet/data/visual_genome data/visual_genome
pip install torchtext==0.2.3
pip install setuptools pyyaml graphviz webcolors pandas matplotlib
pip install git+https://github.com/chickenbestlover/ColorHistogram.git
An Alternative: use installation script
./build.sh
- Download ScanNet dataset
In order to use ScanNet dataset, you need to fill out an agreement to toe ScanNet Terms of Use and send it to the ScanNet team at [email protected]. If the process was successful, they will send you a script downloading ScanNet dataset.
To download a specific scan (e.g. scene0000_00) using the script (the script only runs on Python 2.7):
download-scannet.py -o [directory in which to download] --id scene0000_00
(then press Enter twice)
After the download is finished, the scan is located in a new folder scene0000_00.
In the folder, *.sens file contains the RGBD Video with camera pose.
To extract them, we use SensReader, an extraction tool provided by ScanNet git repo.
git clone https://github.com/ScanNet/ScanNet.git
cd ScanNet/SensReader/python/
python reader.py \
--filename [your .sens filepath] \
--output_path [ROOT of 3D-Scene-Graph]/data/scene0000_00/ \
--export_depth_images \
--export_color_images \
--export_poses \
--export_intrinsics
Example of usage
python scene_graph_tuning.py \
--scannet_path data/scene0000_00/\
--obj_thres 0.23\
--thres_key 0.2\
--thres_anchor 0.68 \
--visualize \
--frame_start 800 \
--plot_graph \
--disable_spurious \
--gain 10 \
--detect_cnt_thres 2 \
--triplet_thres 0.065
Core hyper-parameters
Data settings:
- --dataset : choose dataset, default='scannet'.
- --scannet_path : scannet scan filepath , default='./data/scene0507/'.
- --frame_start : idx of frame to start , default=0.
- --frame_end : idx of frame to end , default=5000.
FactorizableNet Output Filtering Settings:
- --obj_thres : object recognition threshold score , default=0.25.
- --triplet_thres : triplet recognition threshold score , default=0.08.
- --nms : NMS threshold for post object NMS (negative means not NMS) , default=0.2.
- --triplet_nms : Triplet NMS threshold for post object NMS (negative means not NMS) , default=0.4.
Key-frame Extraction Settings:
- --thres_key : keyframe threshold score , default=0.1.
- --thres_anchor : achorframe threshold score , default=0.65.
- --alpha : weight for Exponentially Weighted Summation , default=0.4.
- --gain : gain for adaptive thresholding in blurry image detection , default=25.
- --offset : offset for adaptive thresholding in blurry image detection , default=1.
Visualization Settings:
- --pause_time : a pause interval (sec) for every detection , default=1.
- --plot_graph : plot 3D Scene Graph if true.
- --visualize : enable visualization if ture.
- --format : resulting image format, pdf or png, default='png'.
- --draw_color : draw color node in 3D scene graph if true.
- --save_image : save detection result image if true.
Result

Demo Video
Citations
Please consider citing this project in your publications if it helps your research. The following is a BibTeX reference.
@article{kim2019graph3d,
title={3D-Scene-Graph: A Sparse and Semantic Representation of Physical Environments for Intelligent Agents},
author={Kim, Ue-Hwan and Park, Jin-Man and Song, Taek-Jin and Kim, Jong-Hwan},
journal={IEEE Cybernetics},
year={2019}
}
Acknowledgement
This work was supported by the ICT R&D program of MSIP/IITP. [2016-0-00563, Research on Adaptive Machine Learning Technology Development for Intelligent Autonomous Digital Companion]