fregu856 / Deeplabv3
Programming Languages
Projects that are alternatives of or similar to Deeplabv3
deeplabv3
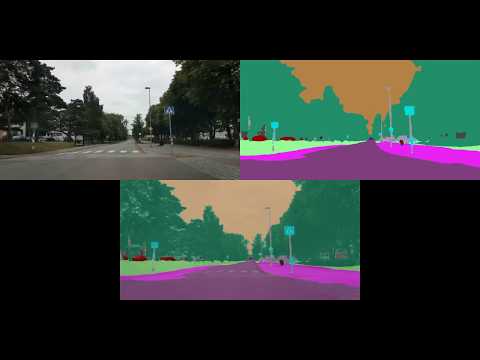
PyTorch implementation of DeepLabV3, trained on the Cityscapes dataset.
- Youtube video of results:
Index
- Using a VM on Paperspace
- Pretrained model
- Training a model on Cityscapes
- Evaluation
- Visualization
- Documentation of remaining code
Paperspace:
To train models and to run pretrained models (with small batch sizes), you can use an Ubuntu 16.04 P4000 VM with 250 GB SSD on Paperspace. Below I have listed what I needed to do in order to get started, and some things I found useful.
-
Install docker-ce:
-
- $ curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo apt-key add -
-
- $ sudo add-apt-repository "deb [arch=amd64] https://download.docker.com/linux/ubuntu $(lsb_release -cs) stable"
-
- $ sudo apt-get update
-
- $ sudo apt-get install -y docker-ce
-
Install CUDA drivers:
-
- $ CUDA_REPO_PKG=cuda-repo-ubuntu1604_9.1.85-1_amd64.deb
-
- $ wget -O /tmp/${CUDA_REPO_PKG} http://developer.download.nvidia.com/compute/cuda/repos/ubuntu1604/x86_64/${CUDA_REPO_PKG}
-
- $ sudo dpkg -i /tmp/${CUDA_REPO_PKG}
-
- $ sudo apt-key adv --fetch-keys http://developer.download.nvidia.com/compute/cuda/repos/ubuntu1604/x86_64/7fa2af80.pub
-
- $ rm -f /tmp/${CUDA_REPO_PKG}
-
- $ sudo apt-get update
-
- $ sudo apt-get install cuda-drivers
-
- Reboot the VM.
-
Install nvidia-docker:
-
- $ sudo dpkg -i /tmp/nvidia-docker*.deb && rm /tmp/nvidia-docker*.deb
-
- $ sudo nvidia-docker run --rm nvidia/cuda nvidia-smi
-
Download the PyTorch 0.4 docker image:
-
- $ sudo docker pull pytorch/pytorch:0.4_cuda9_cudnn7
-
Create start_docker_image.sh containing:
#!/bin/bash
# DEFAULT VALUES
GPUIDS="0"
NAME="paperspace_GPU"
NV_GPU="$GPUIDS" nvidia-docker run -it --rm \
-p 5584:5584 \
--name "$NAME""$GPUIDS" \
-v /home/paperspace:/root/ \
pytorch/pytorch:0.4_cuda9_cudnn7 bash
-
Inside the image, /root/ will now be mapped to /home/paperspace (i.e., $ cd -- takes you to the regular home folder).
-
To start the image:
-
- $ sudo sh start_docker_image.sh
-
To commit changes to the image:
-
- Open a new terminal window.
-
- $ sudo docker commit paperspace_GPU0 pytorch/pytorch:0.4_cuda9_cudnn7
-
To stop the image when it’s running:
-
- $ sudo docker stop paperspace_GPU0
-
To exit the image without killing running code:
-
- Ctrl + P + Q
-
To get back into a running image:
-
- $ sudo docker attach paperspace_GPU0
-
To open more than one terminal window at the same time:
-
- $ sudo docker exec -it paperspace_GPU0 bash
-
To install the needed software inside the docker image:
-
- $ apt-get update
-
- $ apt-get install nano
-
- $ apt-get install sudo
-
- $ apt-get install wget
-
- $ sudo apt install unzip
-
- $ sudo apt-get install libopencv-dev
-
- $ pip install opencv-python
-
- $ python -mpip install matplotlib
-
- Commit changes to the image (otherwise, the installed packages will be removed at exit!)
-
Do the following outside of the docker image:
-
- $ --
-
- $ git clone https://github.com/fregu856/deeplabv3.git
-
- Download the Cityscapes dataset:
-
-
- Register on the website.
-
-
-
- $ wget --keep-session-cookies --save-cookies=cookies.txt --post-data 'username=XXXXX&password=YYYYY&submit=Login' https://www.cityscapes-dataset.com/login/ (where you replace XXXXX with your username, and YYYYY with your password)
-
-
-
- $ wget --load-cookies cookies.txt --content-disposition https://www.cityscapes-dataset.com/file-handling/?packageID=1
-
-
-
- $ wget --load-cookies cookies.txt --content-disposition https://www.cityscapes-dataset.com/file-handling/?packageID=3
-
-
-
- $ unzip gtFine_trainvaltest.zip
-
-
-
- $ unzip leftImg8bit_trainvaltest.zip
-
-
-
- $ mkdir deeplabv3/data
-
-
-
- $ mkdir deeplabv3/data/cityscapes
-
-
-
- $ mv gtFine deeplabv3/data/cityscapes
-
-
-
- $ mv leftImg8bit deeplabv3/data/cityscapes
-
-
-
- $ wget --load-cookies cookies.txt --content-disposition https://www.cityscapes-dataset.com/file-handling/?packageID=12
-
-
-
- $ unzip leftImg8bit_demoVideo.zip
-
-
-
- $ mv leftImg8bit/demoVideo deeplabv3/data/cityscapes/leftImg8bit
-
-
-
- $ wget https://www.dropbox.com/s/vt1d0pjjphwivvc/thn.zip?dl=0 (to download the OPTIONAL Thn sequence data (standard dash cam))
-
-
-
- $ unzip thn.zip?dl=0
-
-
-
- $ mv thn deeplabv3/data
-
-
-
- $ cd deeplabv3
-
-
-
- $ git clone https://github.com/mcordts/cityscapesScripts.git
-
-
-
- Comment out the line
print type(obj).nameon line 238 in deeplabv3/cityscapesScripts/cityscapesscripts/helpers/annotation.py (this is need for the cityscapes scripts to be runnable with Python3)
- Comment out the line
-
Pretrained model:
- pretrained_models/model_13_2_2_2_epoch_580.pth:
-
- Trained for 580 epochs on Cityscapes train and 3333 + 745 images from Berkeley DeepDrive.
Train model on Cityscapes:
- SSH into the paperspace server.
- $ sudo sh start_docker_image.sh
- $ cd --
- $ python deeplabv3/utils/preprocess_data.py (ONLY NEED TO DO THIS ONCE!)
- $ python deeplabv3/train.py
Evaluation
evaluation/eval_on_val.py:
-
SSH into the paperspace server.
-
$ sudo sh start_docker_image.sh
-
$ cd --
-
$ python deeplabv3/utils/preprocess_data.py (ONLY NEED TO DO THIS ONCE!)
-
$ python deeplabv3/evaluation/eval_on_val.py
-
- This will run the pretrained model (set on line 31 in eval_on_val.py) on all images in Cityscapes val, compute and print the loss, and save the predicted segmentation images in deeplabv3/training_logs/model_eval_val.
evaluation/eval_on_val_for_metrics.py:
-
SSH into the paperspace server.
-
$ sudo sh start_docker_image.sh
-
$ cd --
-
$ python deeplabv3/utils/preprocess_data.py (ONLY NEED TO DO THIS ONCE!)
-
$ python deeplabv3/evaluation/eval_on_val_for_metrics.py
-
$ cd deeplabv3/cityscapesScripts
-
$ pip install . (ONLY NEED TO DO THIS ONCE!)
-
$ python setup.py build_ext --inplace (ONLY NEED TO DO THIS ONCE!) (this enables cython, which makes the cityscapes evaluation script run A LOT faster)
-
$ export CITYSCAPES_RESULTS="/root/deeplabv3/training_logs/model_eval_val_for_metrics"
-
$ export CITYSCAPES_DATASET="/root/deeplabv3/data/cityscapes"
-
$ python cityscapesscripts/evaluation/evalPixelLevelSemanticLabeling.py
-
- This will run the pretrained model (set on line 55 in eval_on_val_for_metrics.py) on all images in Cityscapes val, upsample the predicted segmentation images to the original Cityscapes image size (1024, 2048), and compute and print performance metrics:
classes IoU nIoU
--------------------------------
road : 0.918 nan
sidewalk : 0.715 nan
building : 0.837 nan
wall : 0.413 nan
fence : 0.397 nan
pole : 0.404 nan
traffic light : 0.411 nan
traffic sign : 0.577 nan
vegetation : 0.857 nan
terrain : 0.489 nan
sky : 0.850 nan
person : 0.637 0.491
rider : 0.456 0.262
car : 0.897 0.759
truck : 0.582 0.277
bus : 0.616 0.411
train : 0.310 0.133
motorcycle : 0.322 0.170
bicycle : 0.583 0.413
--------------------------------
Score Average : 0.593 0.364
--------------------------------
categories IoU nIoU
--------------------------------
flat : 0.932 nan
construction : 0.846 nan
object : 0.478 nan
nature : 0.869 nan
sky : 0.850 nan
human : 0.658 0.521
vehicle : 0.871 0.744
--------------------------------
Score Average : 0.786 0.632
--------------------------------
Visualization
visualization/run_on_seq.py:
-
SSH into the paperspace server.
-
$ sudo sh start_docker_image.sh
-
$ cd --
-
$ python deeplabv3/utils/preprocess_data.py (ONLY NEED TO DO THIS ONCE!)
-
$ python deeplabv3/visualization/run_on_seq.py
-
- This will run the pretrained model (set on line 33 in run_on_seq.py) on all images in the Cityscapes demo sequences (stuttgart_00, stuttgart_01 and stuttgart_02) and create a visualization video for each sequence, which is saved to deeplabv3/training_logs/model_eval_seq. See Youtube video from the top of the page.
visualization/run_on_thn_seq.py:
-
SSH into the paperspace server.
-
$ sudo sh start_docker_image.sh
-
$ cd --
-
$ python deeplabv3/utils/preprocess_data.py (ONLY NEED TO DO THIS ONCE!)
-
$ python deeplabv3/visualization/run_on_thn_seq.py
-
- This will run the pretrained model (set on line 31 in run_on_thn_seq.py) on all images in the Thn sequence (real-life sequence collected with a standard dash cam) and create a visualization video, which is saved to deeplabv3/training_logs/model_eval_seq_thn. See Youtube video from the top of the page.
Documentation of remaining code
-
model/resnet.py:
-
- Definition of the custom Resnet model (output stride = 8 or 16) which is the backbone of DeepLabV3.
-
model/aspp.py:
-
- Definition of the Atrous Spatial Pyramid Pooling (ASPP) module.
-
model/deeplabv3.py:
-
- Definition of the complete DeepLabV3 model.
-
utils/preprocess_data.py:
-
- Converts all Cityscapes label images from having Id to having trainId pixel values, and saves these to deeplabv3/data/cityscapes/meta/label_imgs. Also computes class weights according to the ENet paper and saves these to deeplabv3/data/cityscapes/meta.
-
utils/utils.py:
-
- Contains helper funtions which are imported and utilized in multiple files.
-
datasets.py:
-
- Contains all utilized dataset definitions.