weigao95 / Surfelwarp
Projects that are alternatives of or similar to Surfelwarp
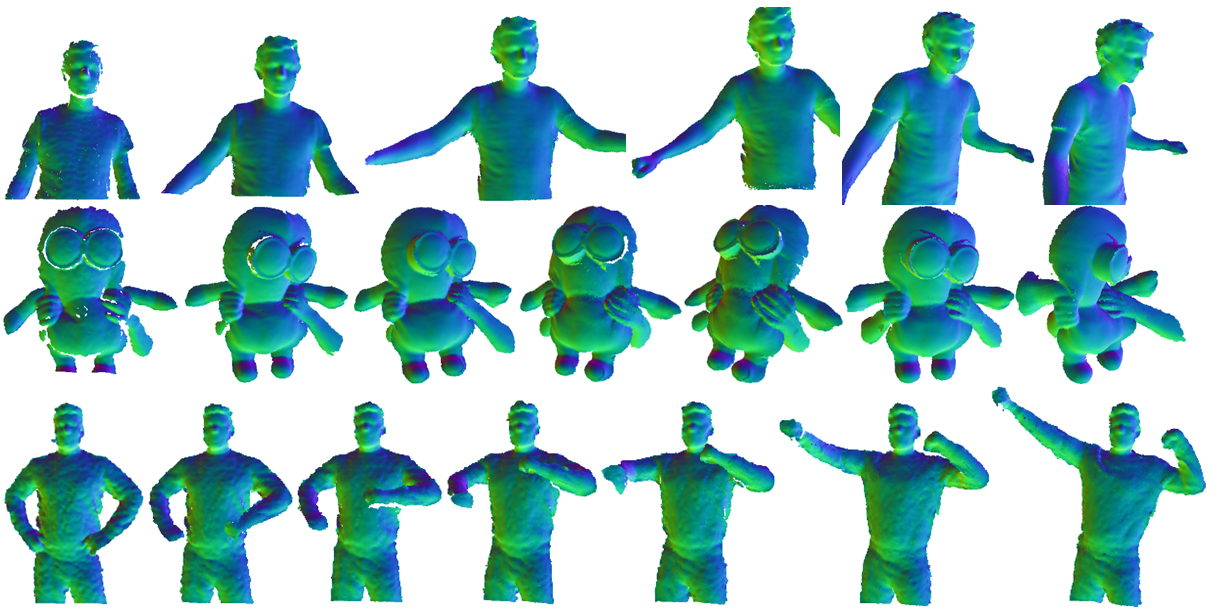
SurfelWarp
SurfelWarp is a dynamic reconstruction pipeline. Compared to other dynamic reconstruction methods like DynamicFusion, surfelwarp uses flat surfel array (instead of volumetric field) as the geometry representation, which makes the pipeline robust and efficient. The approach is described in our paper.
Demo [Video][Presentation]
Publication
Wei Gao and Russ Tedrake, "SurfelWarp: Efficient Non-Volumetic Single View Dynamic Reconstruction", Robotics: Science and Systems (RSS) 2018 [Project][Paper][Presentation]
Build Instructions
The code was originally developed with CUDA 9 and PCL 1.8 on Visual Studio 2015 and Ubuntu 16.04. Thanks to the contribution by @Algomorph, the code works with higher version of CUDA, Ubuntu 18.04 and Visual Studio 2017. Also note that, for some unknown reason, the code runs much slower on Ubuntu (seems to be problem with GPU driver that only permits Debug mode).
According to your environment, please follow the specific build instruction:
-
Ubuntu 16.04 with
CUDA 9(note thatCUDA 10doesn't work with this one) - Ubuntu 16.04/18.04 with
CUDA >= 9(CUDA 10is OK) andcilantro -
Windows 10 with
CUDA 9(CUDA 10doesn't work with this one) - Windows 10 with
CUDA >= 9(CUDA 10is OK) andcilantro
We also provide a pre-built binary for the windows platform (The CUDA -arch flag for this executable is sm_60).
Run Instructions
We use the VolumeDeform dataset to illustrate how to run the code. An example configuration file is provided here for the "boxing" sequence. First, you need to download the boxing sequence from the VolumeDeform dataset and extract it to data_root, your file structure should look like
${data_root}/frame-000000.color.png
${data_root}/frame-000000.depth.png
...
You also need to download the trained model for Global Patch Collider (gpc) from here. Let the path to the model be ${gpc_path} .
In the configuration file, please modify the data_prefix and gpc_model_path to ${data_root} and ${gpc_path}, respectively. After that, you can run the algorithm with
cd ${project_root}/build/apps/surfelwarp_app
./surfelwarp_app /path/to/config
If everything goes well, the executable would produce the reconstructed result per frame in the same folder as surfelwarp_app.
FAQ
-
What's the typical speed of surfelwarp?
On the windows platform with a Nvidia Titan Xp GPU, the processing time is usually less than 20 [ms] per frame. To test the speed in surfelwarp_app, you need to build with Release and disable offline rendering (which takes most of the time).
-
How to use my own data?
You might override the FetchInterface and use it with ImageProcessor. If you don't have performance requirement, you can also convert your data into the format of VolumeDeform.
-
How to deal with topology change?
Currently, only periodic reinitialization is implemented. To use it, set this flag in config file. More advanced criterion of reinitialization would come soon.
TODO
The code is re-factored and improved from the repo of our RSS paper. There are some planned new features and some old code need to be ported into this repository. Here is a list of TODOs:
- [x] Add sparse feature correspondence
- [x] Implement albedo reconstruction
- [ ] Rewrite automatic reinitialization detection for the new geometry and loss function. Currently, only periodic reinitialization is implemented
- [ ] Port the GPU kdtree querying (although the overall speed is already relatively fast)
Contact
If you have any question or suggestion regarding this work, please send me an email.