MIT-SPARK / Kimera
Projects that are alternatives of or similar to Kimera

Kimera
Kimera is a C++ library for real-time metric-semantic simultaneous localization and mapping, which uses camera images and inertial data to build a semantically annotated 3D mesh of the environment. Kimera is modular, ROS-enabled, and runs on a CPU.
Kimera comprises four modules:
- A fast and accurate Visual Inertial Odometry (VIO) pipeline (Kimera-VIO)
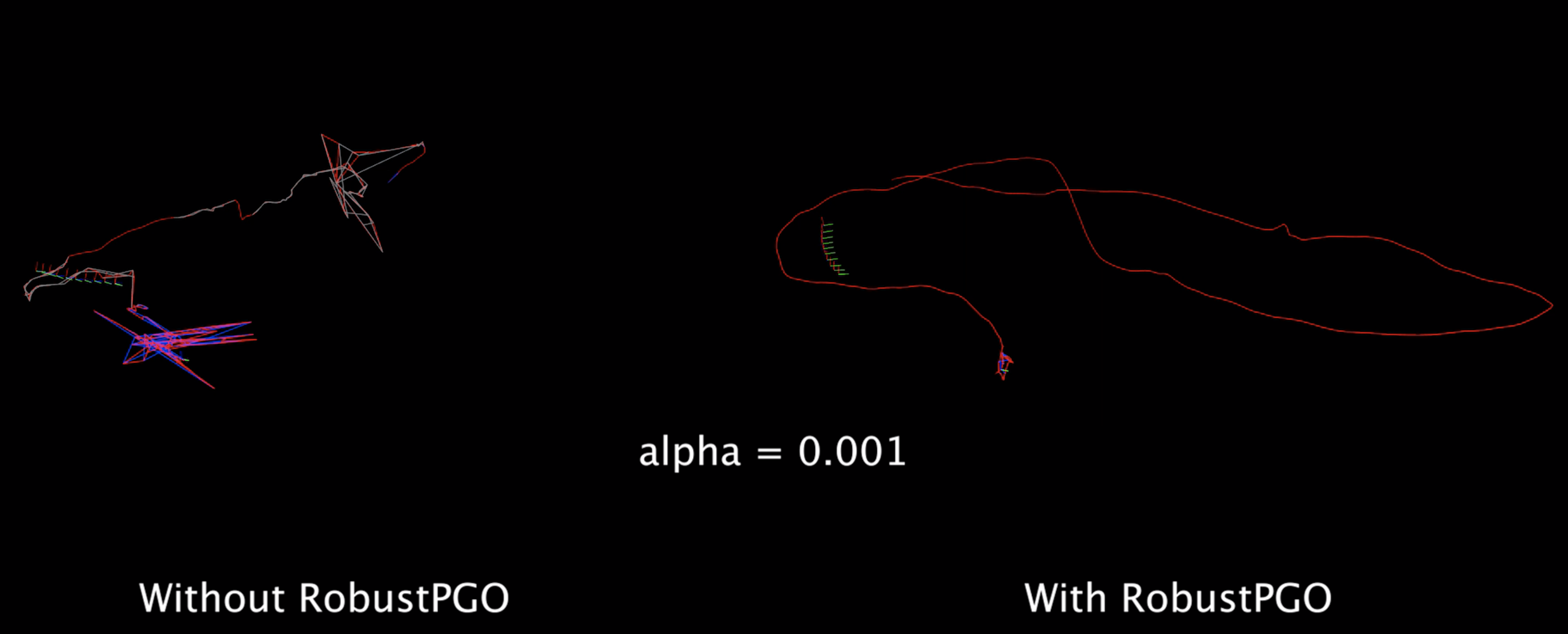
- A full SLAM implementation based on Robust Pose Graph Optimization (Kimera-RPGO)
- A per-frame and multi-frame 3D mesh generator (Kimera-Mesher)
- And a generator of semantically annotated 3D meshes (Kimera-Semantics)
Click on the following links to install Kimera's modules and get started! It is very easy to install!
Kimera-VIO & Kimera-Mesher
Kimera-RPGO
Kimera-Semantics
Chart

Citation
If you found any of the above modules useful, we would really appreciate if you could cite our work:
- [1] A. Rosinol, T. Sattler, M. Pollefeys, L. Carlone. Incremental Visual-Inertial 3D Mesh Generation with Structural Regularities. IEEE Int. Conf. on Robotics and Automation (ICRA), 2019. arXiv:1903.01067
@InProceedings{Rosinol19icra-incremental,
title = {Incremental visual-inertial 3d mesh generation with structural regularities},
author = {Rosinol, Antoni and Sattler, Torsten and Pollefeys, Marc and Carlone, Luca},
year = {2019},
booktitle = {2019 International Conference on Robotics and Automation (ICRA)},
pdf = {https://arxiv.org/pdf/1903.01067.pdf}
}
- [2] A. Rosinol, M. Abate, Y. Chang, L. Carlone, Kimera: an Open-Source Library for Real-Time Metric-Semantic Localization and Mapping. IEEE Intl. Conf. on Robotics and Automation (ICRA), 2020. arXiv:1910.02490.
@InProceedings{Rosinol20icra-Kimera,
title = {Kimera: an Open-Source Library for Real-Time Metric-Semantic Localization and Mapping},
author = {Rosinol, Antoni and Abate, Marcus and Chang, Yun and Carlone, Luca},
year = {2020},
booktitle = {IEEE Intl. Conf. on Robotics and Automation (ICRA)},
url = {https://github.com/MIT-SPARK/Kimera},
pdf = {https://arxiv.org/pdf/1910.02490.pdf}
}
- [3] A. Rosinol, A. Gupta, M. Abate, J. Shi, L. Carlone. 3D Dynamic Scene Graphs: Actionable Spatial Perception with Places, Objects, and Humans. Robotics: Science and Systems (RSS), 2020. arXiv:2002.06289.
@InProceedings{Rosinol20rss-dynamicSceneGraphs,
title = {{3D} Dynamic Scene Graphs: Actionable Spatial Perception with Places, Objects, and Humans},
author = {A. Rosinol and A. Gupta and M. Abate and J. Shi and L. Carlone},
year = {2020},
booktitle = {Robotics: Science and Systems (RSS)},
pdf = {https://arxiv.org/pdf/2002.06289.pdf}
}
- [4] A. Rosinol, A. Gupta, M. Abate, J. Shi, L. Carlone. Kimera: from SLAM to Spatial Perception with 3D Dynamic Scene Graphs. arXiv:2101.06894.
@InProceedings{Rosinol21arxiv-Kimera,
title = {{K}imera: from {SLAM} to Spatial Perception with {3D} Dynamic Scene Graphs},
author = {A. Rosinol, A. Violette, M. Abate, N. Hughes, Y. Chang, J. Shi, A. Gupta, L. Carlone},
year = {2021},
booktitle = {arxiv},
pdf = {https://arxiv.org/pdf/2101.06894.pdf}
}
Open-Source Datasets
In addition to the real-life tests on the Euroc dataset, we use a photo-realistic Unity-based simulator to test Kimera. The simulator provides:
- RGB Stereo camera
- Depth camera
- Ground-truth 2D Semantic Segmentation
- IMU data
- Ground-Truth Odometry
- 2D Lidar
- TF (ground-truth odometry of robots, and agents)
- Static TF (ground-truth poses of static objects)
Using this simulator, we created several large visual-inertial datasets which feature scenes with and without dynamic agents (humans), as well as a large variety of environments (indoors and outdoors, small and large). These are ideal to test your Metric-Semantic SLAM and/or other Spatial-AI systems!
Acknowledgments
Kimera is partially funded by ARL DCIST, ONR RAIDER, MIT Lincoln Laboratory, and “la Caixa” Foundation (ID 100010434), LCF/BQ/AA18/11680088 (A. Rosinol).