Arc Robot VisionMIT-Princeton Vision Toolbox for Robotic Pick-and-Place at the Amazon Robotics Challenge 2017 - Robotic Grasping and One-shot Recognition of Novel Objects with Deep Learning.
Stars: ✭ 224 (+446.34%)
Mutual labels: vision, rgbd
Tsdf FusionFuse multiple depth frames into a TSDF voxel volume.
Stars: ✭ 426 (+939.02%)
Mutual labels: vision, rgbd
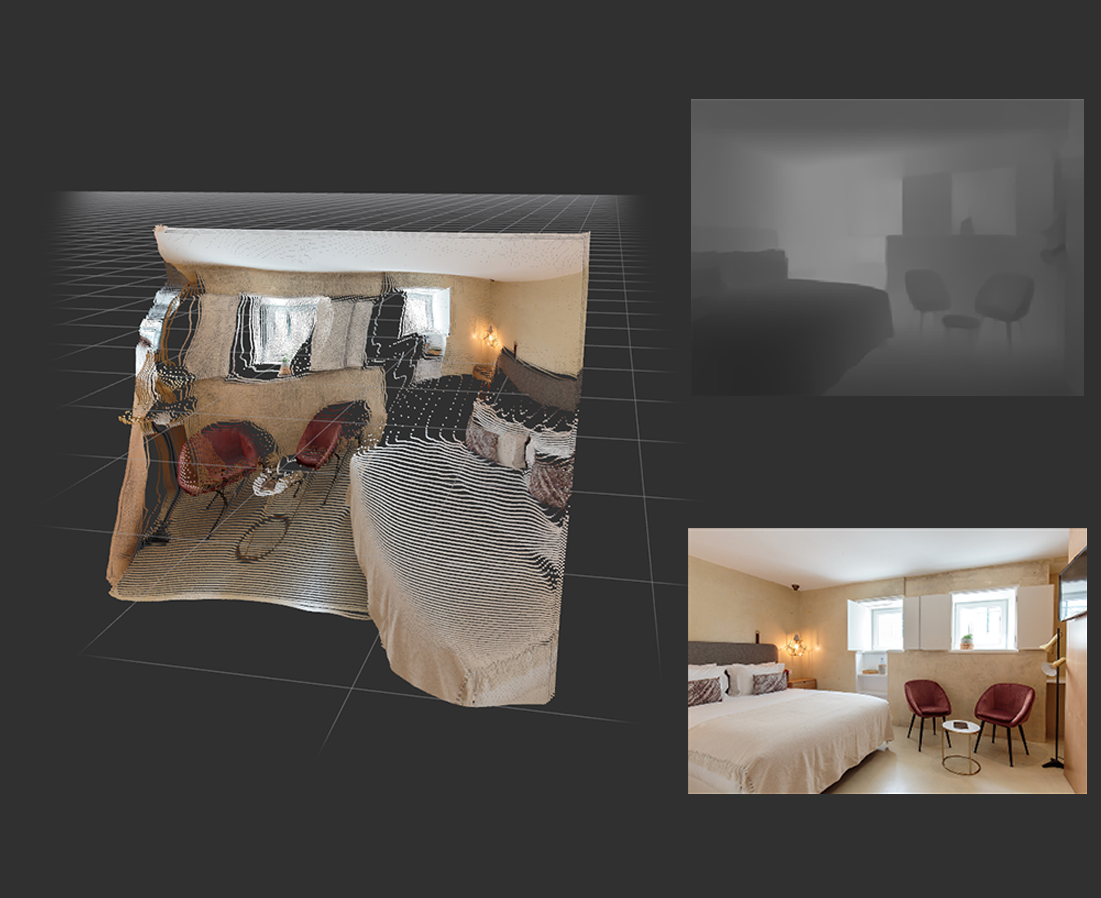
diode-devkitDIODE Development Toolkit
Stars: ✭ 58 (+41.46%)
Mutual labels: rgbd, depth-estimation
Tsdf Fusion PythonPython code to fuse multiple RGB-D images into a TSDF voxel volume.
Stars: ✭ 464 (+1031.71%)
Mutual labels: vision, rgbd
Apc Vision ToolboxMIT-Princeton Vision Toolbox for the Amazon Picking Challenge 2016 - RGB-D ConvNet-based object segmentation and 6D object pose estimation.
Stars: ✭ 277 (+575.61%)
Mutual labels: vision, rgbd
3dmatch Toolbox3DMatch - a 3D ConvNet-based local geometric descriptor for aligning 3D meshes and point clouds.
Stars: ✭ 571 (+1292.68%)
Mutual labels: vision, rgbd
Cs231a NotesThe course notes for Stanford's CS231A course on computer vision
Stars: ✭ 230 (+460.98%)
Mutual labels: vision
autonomous-delivery-robotRepository for Autonomous Delivery Robot project of IvLabs, VNIT
Stars: ✭ 65 (+58.54%)
Mutual labels: vision
Simplecv Stars: ✭ 2,522 (+6051.22%)
Mutual labels: vision
Opticalflow visualizationPython optical flow visualization following Baker et al. (ICCV 2007) as used by the MPI-Sintel challenge
Stars: ✭ 183 (+346.34%)
Mutual labels: vision
rgbd ptamPython implementation of RGBD-PTAM algorithm
Stars: ✭ 65 (+58.54%)
Mutual labels: rgbd
stereo.visionplanar fitting computation using stereo vision techniques
Stars: ✭ 19 (-53.66%)
Mutual labels: vision
frc-score-detectionA program to detect FRC match scores from their livestream.
Stars: ✭ 15 (-63.41%)
Mutual labels: vision
Amazing ArkitARKit相关资源汇总 群:326705018
Stars: ✭ 239 (+482.93%)
Mutual labels: vision
EfficientMORLEfficientMORL (ICML'21)
Stars: ✭ 22 (-46.34%)
Mutual labels: vision
React Native Text DetectorText Detector from image for react native using firebase MLKit on android and Tesseract on iOS
Stars: ✭ 194 (+373.17%)
Mutual labels: vision
Grocery-Product-DetectionThis repository builds a product detection model to recognize products from grocery shelf images.
Stars: ✭ 73 (+78.05%)
Mutual labels: vision
sam-textvqaOfficial code for paper "Spatially Aware Multimodal Transformers for TextVQA" published at ECCV, 2020.
Stars: ✭ 51 (+24.39%)
Mutual labels: vision
nested-transformerNested Hierarchical Transformer https://arxiv.org/pdf/2105.12723.pdf
Stars: ✭ 174 (+324.39%)
Mutual labels: vision