JenningsL / Pointrcnn
Programming Languages
Labels
Projects that are alternatives of or similar to Pointrcnn
PointRCNN
This is not the official implementation of PointRCNN. We add an image segmentation network to improve recall of point cloud segmentation. The 2-stage network is frustum pointNet. Any pull request is appreciated.
Introduction
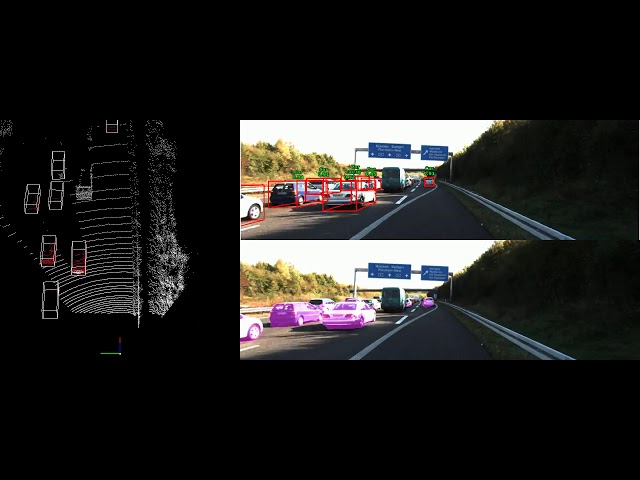
A 3D object detector that takes point cloud and RGB image(optional) as input.
Results

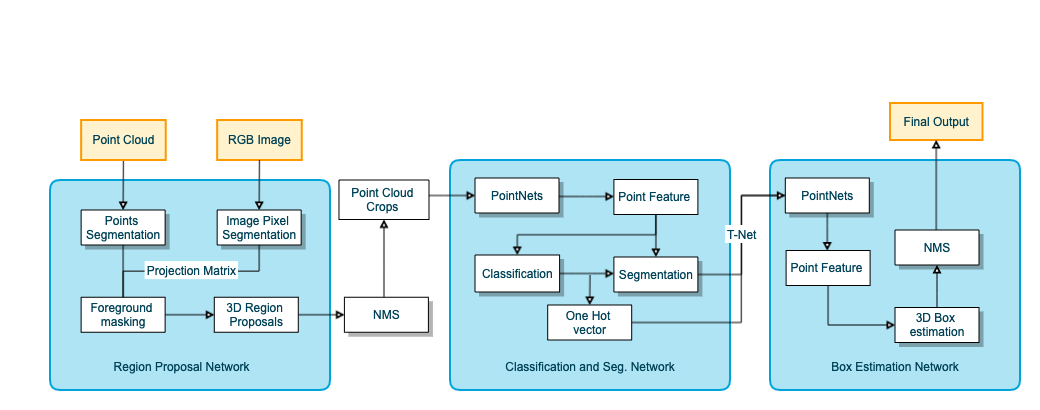
Architecture
- Perform foreground point segmentation on the whole point cloud
- Output a 3D proposal box for every foreground point
- Crop point cloud with proposal boxes and feed into the 2nd-stage classification and box refinement network

Usage
Dependencies
- python2.7
- tensorflow(1.10.0)
- shapely
- mayavi
- opencv-python
- Compile tensorflow operators for pointnet following to https://github.com/charlesq34/frustum-pointnets
Data Preparation
For trainning and validation, download KITTI 3d object detection dataset, and put the folders as
dataset/KITTI/object/
training/
calib/
image_2/
label_2/
velodyne/
testing/
calib/
image_2/
velodyne/
For testing, download KITTI video sequence and calibration files, and put the folders as
2011_10_03/
calib_cam_to_cam.txt
calib_imu_to_velo.txt
calib_velo_to_cam.txt
image_02/
velodyne_points/
[Optional] Scene Augmentation
Our implementation also supports using augmented scene point cloud for training RPN, please refer to the official implementation of PointRCNN. After generating the data, just put the aug_scene/ folder under dataset/KITTI/object. If you don't want to use it, just set use_aug_scene=False when using rpn_dataset.
Image segmentaion annotation
Our image segmentation network is DeelabV3+ official implementation. The senmantic segmentation annotation is obtained by the following steps:
- Pointcloud completion using ip_basic
- Project 3D points to image plane to get segmentation annotation Codes for finetuning can be founded at deeplab_kitti_object. Or you can just use your own image segmentation network.
Train
There are 3 sub-model to be trained.
Region Proposal Network
sh train_rpn.sh
Frustum Pointnet
Before training the 2-Stage Network, we need to save the output of RPN and Image Segmentaion Network to the disk first.
Image Segmentation Network
For now deeplabv3+ is used and finetune on KITTI 3D object dataset
Evaluate
Region Proposal Network
sh test_rpn.sh
This will save the output of RPN and Image segmentation network to ./rcnn_data_train for training the RCNN network.
Frustum Pointnet
test_frustum.sh
Test
End to end
sh test.sh
Evaluation
Point cloud segmentation
| Method | Coverage | Recall | Precision |
|---|---|---|---|
| Point Only | 89.7% | 93.4% | 82.2% |
| Point+Image | 93.5% | 97.0% | 76.6% |
Coverage means the percentage of object that have at least one point being detected.
Recall of RPN
Setting: IoU >= 0.5, 100 proposal
| Method | 3 Classes Recall | Car moderate | Pedastrian Moderate | Cyclist Moderate |
|---|---|---|---|---|
| Point+Image | 89% | 96% | 77% | 52% |
AP on Val Set
| Class | 3D mAP(Easy, Moderate, Hard) | BEV mAP(Easy, Moderate, Hard) |
|---|---|---|
| Car | 76.56 70.20 64.00 | 86.32 78.42 78.07 |
| Pedestrain | 70.23 63.09 55.77 | 73.34 65.86 57.94 |
| Cyclist | 76.89 50.91 50.28 | 78.27 59.00 51.63 |
Pretrained Models
| Model | Link |
|---|---|
| RPN | log_rpn.zip |
| Image SegNet | log_rpn.zip |
| Frustum PointNet | log_frustum.zip |