amov-lab / Prometheus
Licence: bsd-3-clause
Open source software for autonomous drones.
Stars: ✭ 406
Projects that are alternatives of or similar to Prometheus
Pythonrobotics
Python sample codes for robotics algorithms.
Stars: ✭ 13,934 (+3332.02%)
Mutual labels: slam, control
JuliaAutonomy
Julia sample codes for Autonomy, Robotics and Self-Driving Algorithms.
Stars: ✭ 21 (-94.83%)
Mutual labels: control, slam
the-Cooper-Mapper
An open source autonomous driving research platform for Active SLAM & Multisensor Data Fusion
Stars: ✭ 38 (-90.64%)
Mutual labels: control, slam
Deep Learning Localization Mapping
A collection of deep learning based localization models
Stars: ✭ 300 (-26.11%)
Mutual labels: slam
Handycontrols
Contains some simple and commonly used WPF controls based on HandyControl
Stars: ✭ 347 (-14.53%)
Mutual labels: control
Co Fusion
Co-Fusion: Real-time Segmentation, Tracking and Fusion of Multiple Objects
Stars: ✭ 400 (-1.48%)
Mutual labels: slam
Sparse To Dense.pytorch
ICRA 2018 "Sparse-to-Dense: Depth Prediction from Sparse Depth Samples and a Single Image" (PyTorch Implementation)
Stars: ✭ 334 (-17.73%)
Mutual labels: slam
Semantic slam
Real time semantic slam in ROS with a hand held RGB-D camera
Stars: ✭ 317 (-21.92%)
Mutual labels: slam
G2opy
Python binding of SLAM graph optimization framework g2o
Stars: ✭ 360 (-11.33%)
Mutual labels: slam
Reactionbutton
Since Facebook introduced reactions in 2016, it became a standard in several applications as a way for users to interact with content. ReactionButton is a control that allows developers to add this functionality to their apps in an easy way.
Stars: ✭ 305 (-24.88%)
Mutual labels: control
Comma2k19
A driving dataset for the development and validation of fused pose estimators and mapping algorithms
Stars: ✭ 391 (-3.69%)
Mutual labels: slam
Overlapnet
OverlapNet - Loop Closing for 3D LiDAR-based SLAM (chen2020rss)
Stars: ✭ 299 (-26.35%)
Mutual labels: slam
Awesome Image Registration
image registration related books, papers, videos, and toolboxes
Stars: ✭ 380 (-6.4%)
Mutual labels: slam
Tfbubbleitup
Custom view for writing tags, contacts and etc. - written in Swift
Stars: ✭ 333 (-17.98%)
Mutual labels: control
Rpg quadrotor control
Quadrotor control framework developed by the Robotics and Perception Group
Stars: ✭ 346 (-14.78%)
Mutual labels: control

Prometheus - 自主无人机开源项目
Prometheus,在希腊神话中,是最具智慧的神明之一,希望本项目能为无人机研发工作带来无限的智慧与光明。
项目总览
Prometheus是一套开源的自主无人机软件平台,为无人机的智能与自主飞行提供全套解决方案。本项目基于PX4开源飞控固件,旨在为PX4开发者配套成熟可用的机载电脑端程序,提供更加简洁快速的开发体验。目前已集成建图、定位、规划、控制及目标检测等模块,并配套有Gazebo仿真测试代码。
-
安装及使用: Prometheus WIKI
-
配套课程: Prometheus自主无人机二次开发课程,本课程偏重本项目中的基础知识和操作实践,适合本项目入门者,购买课程后会定期安排线上答疑活动(语音交流、方便透彻!) 课程报名
-
配套硬件: 即将推出,敬请期待! 请关注 阿木实验室淘宝店 或 阿木实验室京东旗舰店
-
配套地面站: 即将推出,敬请期待!
-
开发及维护团队: 开发成员介绍

-
开源项目,维护不易,还烦请点一个star收藏,谢谢支持!
-
关于项目有任何问题,请在本项目issue提问,或者添加微信jiayue199506(备注消息:Prometheus)进入Prometheus自主无人机交流群
-
想了解更多资讯信息或者寻求项目合作、无人机软硬件定制服务,请扫描右方二维码并关注微信公众号 阿木实验室
Prometheus校园赞助计划
只要使用Prometheus项目进行自主无人机开发,并发表论文,即可获得阿木奖学金,详情请戳这里 !
功能展示
-
RGBD相机建图
-
3D激光雷达建图(暂无演示图片)
-
局部规划(APF)

-
全局规划(A star)

-
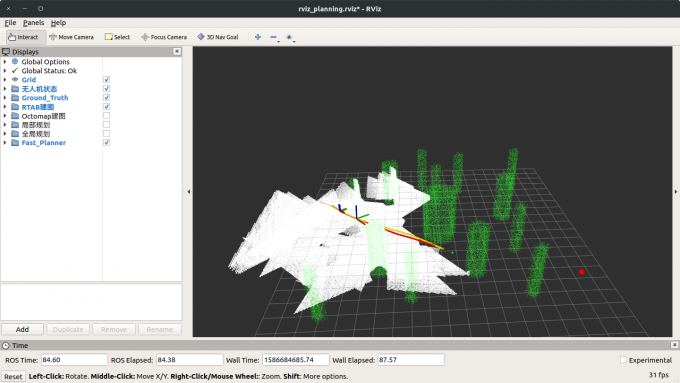
轨迹优化(Fast_Planner)
-
外环控制器二次开发
-
多机编队飞行(集中式或分布式控制)


-
圆形穿越
-
颜色巡线
-
数字识别
-
KCF框选追踪

-
YOLO通用目标检测(暂缺演示图)
-
移动平台自主降落
-
无人机+无人车协同控制
版权申明
- 本项目受 BSD 3-Clause 协议保护。点击 LICENSE了解更多
- 本项目仅限个人使用,请勿用于商业用途。
- 如利用本项目进行营利活动,阿木实验室将追究侵权行为。
Note that the project description data, including the texts, logos, images, and/or trademarks,
for each open source project belongs to its rightful owner.
If you wish to add or remove any projects, please contact us at [email protected].