tx2_fcnn_node
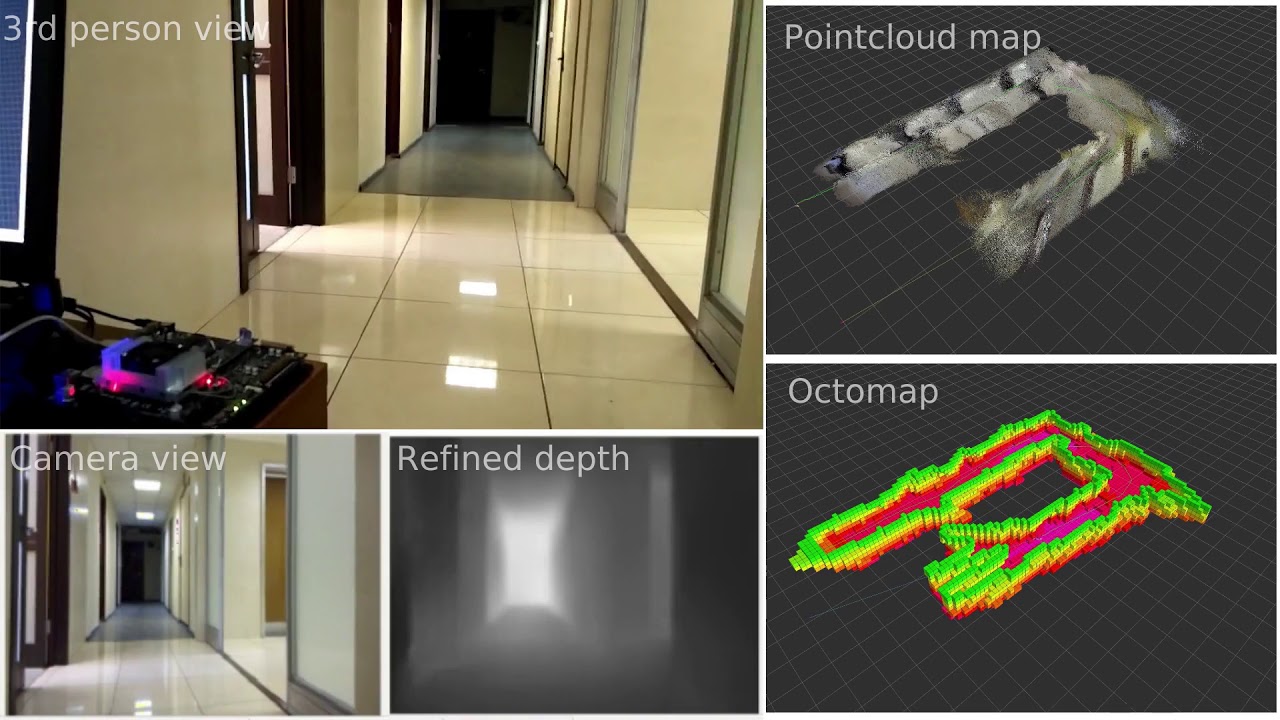
ROS node for real-time FCNN-based depth reconstruction (as in paper). The platforms are NVidia Jetson TX2 and x86_64 PC with GNU/Linux (aarch64 should work as well, but not tested).
Publications
If you use this work in an academic context, please cite the following publication(s):
@conference{Bokovoy2019,
author={Bokovoy, A. and Muravyev, K. and Yakovlev, K.},
title={Real-time vision-based depth reconstruction with NVIDIA jetson},
journal={2019 European Conference on Mobile Robots, ECMR 2019 - Proceedings},
year={2019},
doi={10.1109/ECMR.2019.8870936},
art_number={8870936},
url={https://www.scopus.com/inward/record.uri?eid=2-s2.0-85074429057&doi=10.1109%2fECMR.2019.8870936&partnerID=40&md5=b87bcba0803147012ee1062f867cc4ef},
document_type={Conference Paper},
source={Scopus},
}
System requirements
- Linux-based system with aarch64 or x86_64 architecture or NVidia Jetson TX2.
- NVidia graphic card.
Pre-requesites
- ROS Kinetic or higher.
- TensorRT 5.0 or higher.
- CUDA 9.0 or higher
- CUDNN + CuBLAS
- GStreamer-1.0
- glib2.0
Optional:
- RTAB-MAP
Compile
Assuming you already have ROS and CUDA related tools installed
- Install remaining pre-requesites:
$ sudo apt-get update
$ sudo apt-get install -y libqt4-dev qt4-dev-tools \
libglew-dev glew-utils libgstreamer1.0-dev \
libgstreamer-plugins-base1.0-dev libglib2.0-dev \
libgstreamer-plugins-good
$ sudo apt-get install -y libopencv-calib3d-dev libopencv-dev
- Navigate to your catkin workspace and clone the repository:
$ git clone https://github.com/CnnDepth/tx2_fcnn_node.git
$ cd tx2_fcnn_node && git submodule update --init --recursive- Build the node:
Navigate to catkin workspace folder.
a) On jetson:
$ catkin_makeb) On x86_64 PC
$ catkin_make --cmake-args -DPATH_TO_TENSORRT_LIB=/usr/lib/x86_64-linux-gnu \
-DPATH_TO_TENSORRT_INCLUDE=/usr/include -DPATH_TO_CUDNN=/usr/lib/x86_64-linux-gnu \
-DPATH_TO_CUBLAS=/usr/lib/x86_64-linux-gnuChange the paths accordingly.
- Build the TensorRT engine
Compile engine builder.
$ catkin_make --cmake-args -DBUILD_ENGINE_BUILDER=1Download UFF models.
$ roscd tx2_fcnn_node
$ sh ./download_models.shCompile the engine.
$ cd engine
$ rosrun tx2_fcnn_node fcrn_engine_builder --uff=./resnet_nonbt_shortcuts_320x240.uff --uffInput=tf/Placeholder \
--output=tf/Reshape --height=240 --width=320 --engine=./test_engine.trt --fp16- Run:
$ roslaunch tx2_fcnn_node cnn_only.launchor with RTAB-MAP
$ roslaunch tx2_fcnn_node rtabmap_cnn.launchRun in a container
- Build image:
$ cd docker
$ docker build . -t rt-ros-docker- Run an image:
$ nvidia-docker run -device=/dev/video0:/dev/video0 -it --rm rt-ros-docker- Create ros workspace:
$ mkdir -p catkin_ws/src && cd catkin_ws/src
$ catkin_init_workspace
$ cd ..
$ catkin_make
$ source devel/setup.bash- Build tx2_fcnn_node:
$ cd src
$ git clone https://github.com/CnnDepth/tx2_fcnn_node.git
$ cd tx2_fcnn_node && git submodule update --init --recursive
$ catkin_make- Run the node:
rosrun tx2_fcnn_node tx2_fcnn_nodeNodes
tx2_fcnn_node
Reads the images from camera or image topic and computes the depth map.
Subscribed Topics
-
/image(sensor_msgs/Image)The input color image for depth reconstruction
Published topics
-
/rgb/image(sensor_msgs/Image)The output color image.
-
/depth/image(sensor_msgs/Image)The output depth map. The image is in CV_32FC1.
-
/rgb/camera_info(sensor_msgs/CameraInfo)Camera info.
-
/depth/camera_info(sensor_msgs/CameraInfo)"Depth" camera info. Duplicates /rgb/camera_info
Parameters
-
input_width(int, default: 320)Input image width for TensorRT engine
-
input_height(int, default: 240)Input image height for TensorRT engine
-
use_camera(bool, default: true)If true - use internal camera as image source. False - use /image topic as input source.
-
camera_mode(int, default: -1)Only works if use_camera:=true. Sets camera device to be opened. -1 - default device.
-
camera_link(string, default: "camera_link")Name of camera's frame_id.
-
depth_link(string, default: "depth_link")Name of depth's frame_id
-
engine_name(string, default: "test_engine.trt")Name of the compiled TensorRT engine file, localed in "engine" folder.
-
calib_name(string, default: "tx2_camera_calib.yaml")Name of calibration file, obrained with camera_calib node. May be either in .yaml or .ini format.
-
input_name(string, default: "tf/Placeholder")Name of the input of TensorRT engine.
-
output_name(string, default: "tf/Reshape")Name of the output of TensorRT engine
-
mean_r(float, default: 123.0)R channel mean value, used during FCNN training.
-
mean_g(float, default: 115.0)G channel mean value, used during FCNN training.
-
mean_b(float, default: 101.0)B channel mean value, used during FCNN training.
Sample models
Models pre-trained on NYU Depth v2 dataset are available in http://pathplanning.ru/public/ECMR-2019/engines/. The models are stored in UFF format. They can be converted into TensorRT engines using tensorrt_samples.
Troubleshooting
Stack smashing
If you run this node on Ubuntu 16.04 or older, the node may fail to start and show Stack smashing detected log message. To fix it, remove XML.* files in Thirdparty/fcrn-inference/jetson-utils directory, and recompile the project.
Inverted image
If you run this node on Jetson, RGB and depth image may be shown inverted. To fix it, open Thirdparty/fcrn-inference/jetson-utils/camera/gstCamera.cpp file in text editor, go to lines 344-348, and change value of flipMethod constant to 0. After editing, recompile the project.