ydsf16 / Dre_slam
Labels
Projects that are alternatives of or similar to Dre slam
DRE-SLAM
Dynamic RGB-D Encoder SLAM for a Differential-Drive Robot
Authors: Dongsheng Yang, Shusheng Bi, Wei Wang, Chang Yuan, Wei Wang, Xianyu Qi, and Yueri Cai

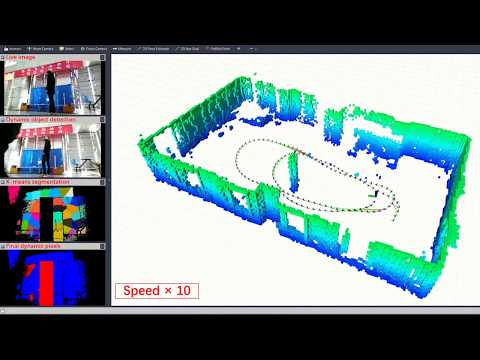
DRE-SLAM is developed for a differential-drive robot that runs in dynamic indoor scenarios. It takes the information of an RGB-D camera and two wheel-encoders as inputs. The outputs are the 2D pose of the robot and a static background OctoMap.
Video: Youtube or Dropbox or Pan.Baidu
Paper: DRE-SLAM: Dynamic RGB-D Encoder SLAM for a Differential-Drive Robot, Dongsheng Yang, Shusheng Bi, Wei Wang, Chang Yuan, Wei Wang, Xianyu Qi, and Yueri Cai. (Remote Sensing, 2019) PDF, WEB
Prerequisites
1. Ubuntu 16.04
2. ROS Kinetic
Follow the instructions in: http://wiki.ros.org/kinetic/Installation/Ubuntu
3. ROS pacakges
sudo apt-get install ros-kinetic-cv-bridge ros-kinetic-tf ros-kinetic-message-filters ros-kinetic-image-transport ros-kinetic-octomap ros-kinetic-octomap-msgs ros-kinetic-octomap-ros ros-kinetic-octomap-rviz-plugins ros-kinetic-octomap-server ros-kinetic-pcl-ros ros-kinetic-pcl-msgs ros-kinetic-pcl-conversions ros-kinetic-geometry-msgs
4. OpenCV 4.0
We use the YOLOv3 implemented in OpenCV 4.0.
Follow the instructions in: https://opencv.org/opencv-4-0-0.html
5. Ceres
Follow the instructions in: http://www.ceres-solver.org/installation.html
Build DRE-SLAM
1. Clone the repository
cd ~/catkin_ws/src
git clone https://github.com/ydsf16/dre_slam.git
2. Build DBow2
cd dre_slam/third_party/DBoW2
mkdir build
cd build
cmake ..
make -j4
3. Build Sophus
cd ../../Sophus
mkdir build
cd build
cmake ..
make -j4
4. Build object detector
cd ../../../object_detector
mkdir build
cd build
cmake ..
make -j4
5. Download the YOLOv3 model
cd ../../config
mkdir yolov3
cd yolov3
wget https://pjreddie.com/media/files/yolov3.weights
wget https://github.com/pjreddie/darknet/blob/master/cfg/yolov3.cfg?raw=true -O ./yolov3.cfg
wget https://github.com/pjreddie/darknet/blob/master/data/coco.names?raw=true -O ./coco.names
6. Catkin_make
cd ~/catkin_ws
catkin_make
source ~/catkin_ws/devel/setup.bash
Example
Dataset
We collected several data sequences in our lab using our Redbot robot. The dataset is available at Pan.Baidu or Dropbox.
Run
1. Open a terminal and launch dre_slam
roslaunch dre_slam comparative_test.launch
2. Open a terminal and play one rosbag
rosbag play <bag_name>.bag
Run on your own robot
You need to do three things:
-
Calibrate the intrinsic parameter of the camera, the robot odometry parameter, and the rigid transformation from the camera to the robot.
-
Prepare a parameter configuration file, refer to the config folder.
-
Prepare a launch file, refer to the launch folder.
Contact us
For any issues, please feel free to contact Dongsheng Yang: [email protected]