linorobot / Linorobot
Licence: bsd-2-clause
Autonomous ground robots (2WD, 4WD, Ackermann Steering, Mecanum Drive)
Stars: ✭ 598
Projects that are alternatives of or similar to Linorobot
Webots
Webots Robot Simulator
Stars: ✭ 1,324 (+121.4%)
Mutual labels: robotics, ros, autonomous-vehicles
Autorally
Software for the AutoRally platform
Stars: ✭ 595 (-0.5%)
Mutual labels: robotics, ros, autonomous-vehicles
Fourth robot pkg
4号機(KIT-C4)用リポジトリ
Stars: ✭ 7 (-98.83%)
Mutual labels: robotics, ros, autonomous-vehicles
FusionAD
An open source autonomous driving stack by San Jose State University Autonomous Driving Team
Stars: ✭ 30 (-94.98%)
Mutual labels: robotics, ros, autonomous-vehicles
Navigator
NaviGator ASV on-board software
Stars: ✭ 29 (-95.15%)
Mutual labels: robotics, ros, autonomous-vehicles
erdos
Dataflow system for building self-driving car and robotics applications.
Stars: ✭ 135 (-77.42%)
Mutual labels: robotics, ros, autonomous-vehicles
Ros Sensor Fusion Tutorial
An in-depth step-by-step tutorial for implementing sensor fusion with robot_localization! 🛰
Stars: ✭ 306 (-48.83%)
Mutual labels: robotics, ros
Handeye calib camodocal
Easy to use and accurate hand eye calibration which has been working reliably for years (2016-present) with kinect, kinectv2, rgbd cameras, optical trackers, and several robots including the ur5 and kuka iiwa.
Stars: ✭ 364 (-39.13%)
Mutual labels: robotics, ros
Ifopt
An Eigen-based, light-weight C++ Interface to Nonlinear Programming Solvers (Ipopt, Snopt)
Stars: ✭ 372 (-37.79%)
Mutual labels: robotics, ros
Tf Pose Estimation
Deep Pose Estimation implemented using Tensorflow with Custom Architectures for fast inference.
Stars: ✭ 3,856 (+544.82%)
Mutual labels: robotics, ros
Cherry Autonomous Racecar
Implementation of the CNN from End to End Learning for Self-Driving Cars on a Nvidia Jetson TX1 using Tensorflow and ROS
Stars: ✭ 294 (-50.84%)
Mutual labels: robotics, ros
Matlabrobotics
MATLAB sample codes for mobile robot navigation
Stars: ✭ 332 (-44.48%)
Mutual labels: robotics, autonomous-vehicles
Se2lam
(ICRA 2019) Visual-Odometric On-SE(2) Localization and Mapping
Stars: ✭ 285 (-52.34%)
Mutual labels: robotics, ros
Camlasercalibratool
Extrinsic Calibration of a Camera and 2d Laser
Stars: ✭ 277 (-53.68%)
Mutual labels: robotics, ros
Ros comm
ROS communications-related packages, including core client libraries (roscpp, rospy, roslisp) and graph introspection tools (rostopic, rosnode, rosservice, rosparam).
Stars: ✭ 525 (-12.21%)
Mutual labels: robotics, ros
Pinocchio
A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives
Stars: ✭ 432 (-27.76%)
Mutual labels: robotics, ros
Elevation mapping
Robot-centric elevation mapping for rough terrain navigation
Stars: ✭ 520 (-13.04%)
Mutual labels: robotics, ros
linorobot 
Linorobot is a suite of Open Source ROS compatible robots that aims to provide students, developers, and researchers a low-cost platform in creating new exciting applications on top of ROS.
Tutorial
You can read the full tutorial how to build your robot here.
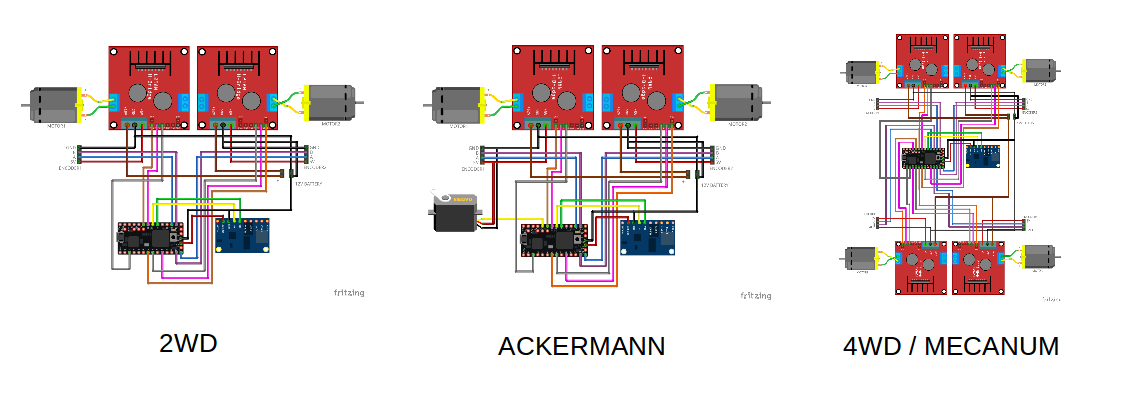
Multiplatform
Supports multiple types of robot base:
- 2WD
- 4WD
- Ackermann Steering
- Mecanum drive

Works on:
- ROS Indigo (Ubuntu 14.04)
- ROS Kinetic (Ubuntu 16.04)
Hardware
Fabricate your own Teensy 3.1/3.2 shield,
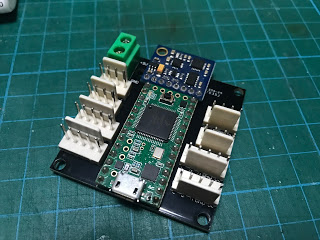
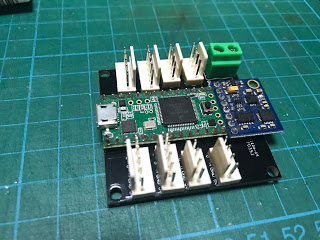
or wire it on your own. Wiring diagrams are also provided.
Supported IMUs:
- GY-85
- MPU6050
- MPU9150
- MPU9250
The IMU drivers are based on i2cdevlib.
Supported Motor Drivers:
- L298 (MAX: 35V, 2A)
- BTS7960 (MAX: 24V, 43A)
- Electronic Speed Controllers (ESC) w/ Reverse. This has been tested to control brushless motors used in RC cars and hoverboards.
Supported ROS Compatible Sensors:
- XV11 Lidar
- RPLidar
- YDLIDAR X4
- Hokuyo (SCIP 2.2 Compliant)
- Intel RealSense R200
- Kinect
Tested on Linux compatible ARM dev boards:
- Raspberry Pi 3/B+
- Jetson TK1
- Jetson TX1
- Odroid XU4
- Radxa Rock Pro
**Technically this should also work with any ARM dev board at least (1GB RAM) that runs Ubuntu Trusty or Xenial.
Installation
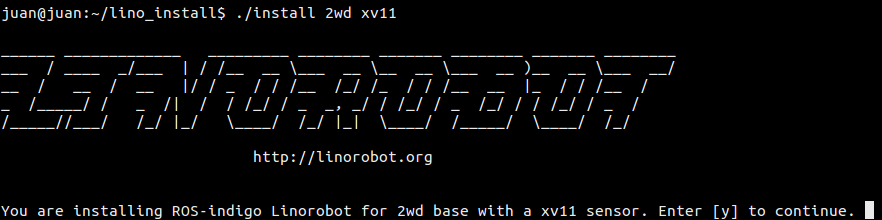
git clone https://github.com/linorobot/lino_install && cd lino_install
./install <base> <sensor>
Firmware
Flexible and configurable components. linorobot_ws/teensy/firmware/lib/config/lino_base_config.h
Robot base configuration:
//uncomment the base you're building
#define LINO_BASE DIFFERENTIAL_DRIVE
// #define LINO_BASE SKID_STEER
// #define LINO_BASE ACKERMANN
// #define LINO_BASE ACKERMANN1
// #define LINO_BASE MECANUM
IMU configuration:
//uncomment the IMU you're using
#define USE_GY85_IMU
// #define USE_MP6050_IMU
// #define USE_MPU9150_IMU
// #define USE_MPU9250_IMU
Motor driver configuration:
//uncomment the motor driver you're using
#define USE_L298_DRIVER
// #define USE_BTS7960_DRIVER
// #define USE_ESC
Motor configuration:
//define your robot' specs here
#define MAX_RPM 330 // motor's maximum RPM
#define COUNTS_PER_REV 1550 // wheel encoder's no of ticks per rev
#define WHEEL_DIAMETER 0.10 // wheel's diameter in meters
#define PWM_BITS 8 // PWM Resolution of the microcontroller
#define LR_WHEELS_DISTANCE 0.235 // distance between left and right wheels
#define FR_WHEELS_DISTANCE 0.30 // distance between front and rear wheels
#define MAX_STEERING_ANGLE 0.415 // max steering angle. This only applies to Ackermann steering
Uploading the codes:
cd ~/linorobot_ws/src/linorobot/teensy/firmware
platformio run --target upload
Creating a Map
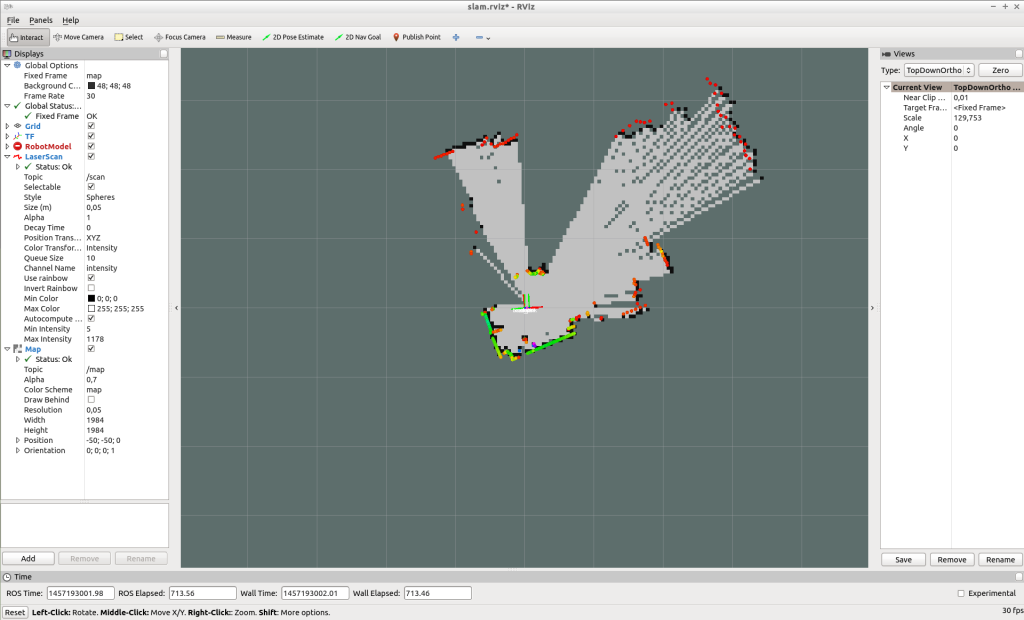
Launch base driver:
roslaunch linorobot bringup.launch
Launch mapping packages:
roslaunch linorobot slam.launch
Autonomous Navigation
Launch base driver:
roslaunch linorobot bringup.launch
Launch navigation packages:
roslaunch linorobot navigate.launch
Note that the project description data, including the texts, logos, images, and/or trademarks,
for each open source project belongs to its rightful owner.
If you wish to add or remove any projects, please contact us at [email protected].