![]()
SALSA: Semantic Assisted Life-Long SLAM for Indoor Environments
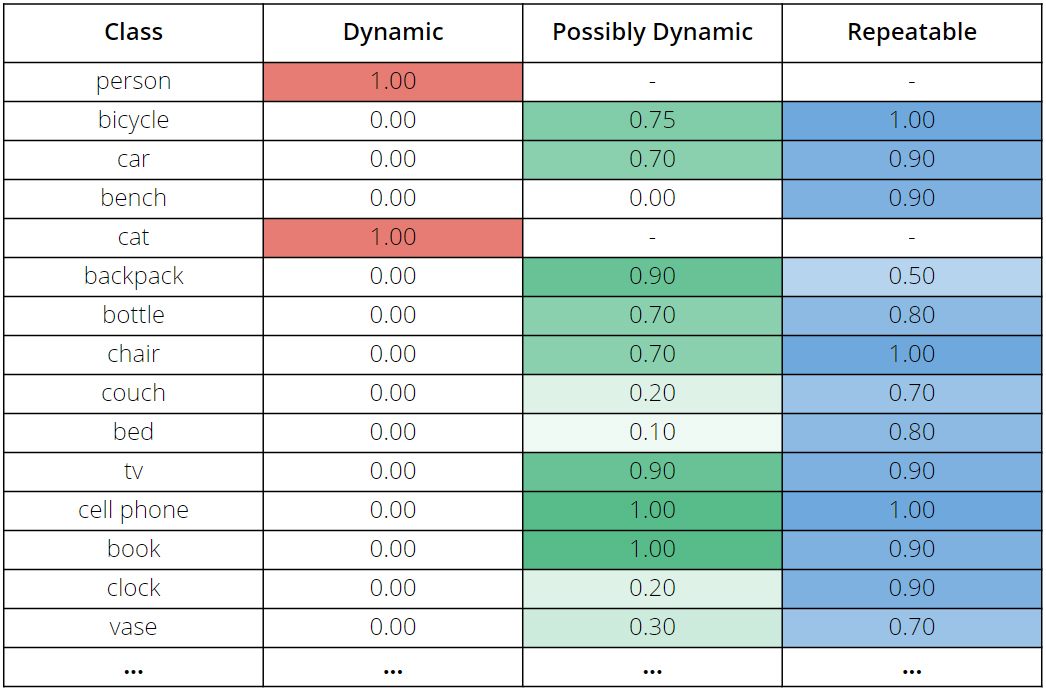
We propose a learning augmented lifelong SLAM method for indoor environments. Most of the existing SLAM methods assume a static environment and disregard dynamic objects. Another problem is that most feature and semantic based SLAM methods fail in repetitive environments. The unexpected changes of surroundings corrupts the quality of the tracking and leads to system failure. This project aims to use learning methods to classify landmarks and objects as dynamic and/or repeatable in nature to better handle optimization, achieve robust performance in a changing environment, and to re-localize in a lifelong-setting. We propose using semantic information and assigning scores to object feature points based on their probability to be dynamic and/or repeatable. We update the front-end, optimization cost functions, and BOW feature generation for loop closures from the original ORB-SLAM2 pipeline. Please see our paper for more details.

Mask-RCNN was used to segment object instances and the scores were mapped according to the scale shown on the right. The left column shows score maps for the OpenLORIS-Scene [3] cafe1-2 sequence and the right column shows the score maps for TUM-RGBD walking_static sequence.
Setup and Usage
The current version does not perform segmentation online, the score maps are pre-computed using Detectron 2's Mask RCNN network and appended into the ROS bag file (using scripts/update_rosbag.py). See USAGE.md for more details on setting up and running this pipeline.
catkin build
roslaunch orb_slam_2_ros salsa.launch
Please see our report for the changes that we have made in the pipeline. We have tested on monocular camera data, RGB-D camera is still experimental and might work. Stereo mode is supported in the back-end optimization but the front-end (feature culling and ROS node integration) is not fully supported yet.
Results
RMSE Absolute Trajectory Error (ATE) on TUM-RGBD Dataset
| Sequences | ORB-SLAM2 [1] | DS-SLAM [2] | SALSA (Ours) |
|---|---|---|---|
| walking_static | 0.4030m | 0.0081m | 0.0059m |
| walking_xyz | 0.1780m | 0.0247m | 0.0521m |
RMSE Relative Pose Error (RPE) on TUM-RGBD Dataset
| Sequences | ORB-SLAM2 [1] | DS-SLAM [2] | SALSA (Ours) |
|---|---|---|---|
| walking_static | 0.2162m | 0.0102 | 0.00829m |
| walking_xyz | 0.4124m | 0.0333 | 0.02951m |
RMSE Absolute Trajectory Error (ATE) on OpenLORIS-Scene [3] Dataset
| Sequences | ORB-SLAM2 [1] | SALSA (Ours) |
|---|---|---|
| cafe1_1 | 0.0777m | 0.0464m |
| cafe1_2 | 0.0813m | 0.0588m |

Videos
TUM-RGBD Sequences: YouTube Link
OpenLORIS-Scene Sequences: YouTube Link.
![]() Dynamic feature points in the red mask region are removed. Possibly dynamic and repeatable feature points have a shade a green/blue and rest of the static object features points are labelled in yellow.
Dynamic feature points in the red mask region are removed. Possibly dynamic and repeatable feature points have a shade a green/blue and rest of the static object features points are labelled in yellow.
Citation
Please cite our work if you use SALSA.
@unpublished{SALSA2020,
author = {Ayush Jhalani and Heethesh Vhavle and Sachit Mahajan},
title = {{SALSA}: Semantic Assisted Life-Long {SLAM} for Indoor Environments},
note = {16-833 Robot Localization and Mapping (Spring 2020) Final Project at Carnegie Mellon University},
month = "May",
year = "2020"
}
References
[1] R. Mur-Artal and J. D. Tardos, "Orb-slam2: An open-source slam" system for monocular, stereo, and rgb-d cameras,” IEEE Transactions on Robotics, vol. 33, no. 5, pp. 1255–1262, 2017.
[2] C. Yu, Z. Liu, X. Liu, F. Xie, Y. Yang, Q. Wei, and Q. Fei, "Dsslam: A semantic visual slam towards dynamic environments," in 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018, pp. 1168–1174.
3] X. Shi, D. Li, P. Zhao, Q. Tian, Y. Tian, Q. Long, C. Zhu, J. Song, F. Qiao, L. Song, Y. Guo, Z. Wang, Y. Zhang, B. Qin, W. Yang, F. Wang, R. H. M. Chan, and Q. She, "Are we ready for service robots? the openloris-scene datasets for lifelong slam," 2019. Dataset Link